klasifikuje sa podľa kritérií:
ak sa informácia vyhodnocuje:
okamžite pomocou spätnej väzby -> regulácia
bez okamžitej spätnej väzby -> ovládanie
Automatizácia, alebo ak ťa život príliš baví, tu je najefektívnejší poloautomatický spôsob na zníženie radosti z tvojho života len za cenu prenesených dát a tvojej duše(v cene)
Kybernetická teória algoritmov 4
Kybernetická teória riadenia 4
Prostriedky získavania informácii 8
Kontaktné kapacitné snímače 19
Bezdotykové(bezkontaktné) snímače 28
analógovo číslicové – A/Č, A/D: 32
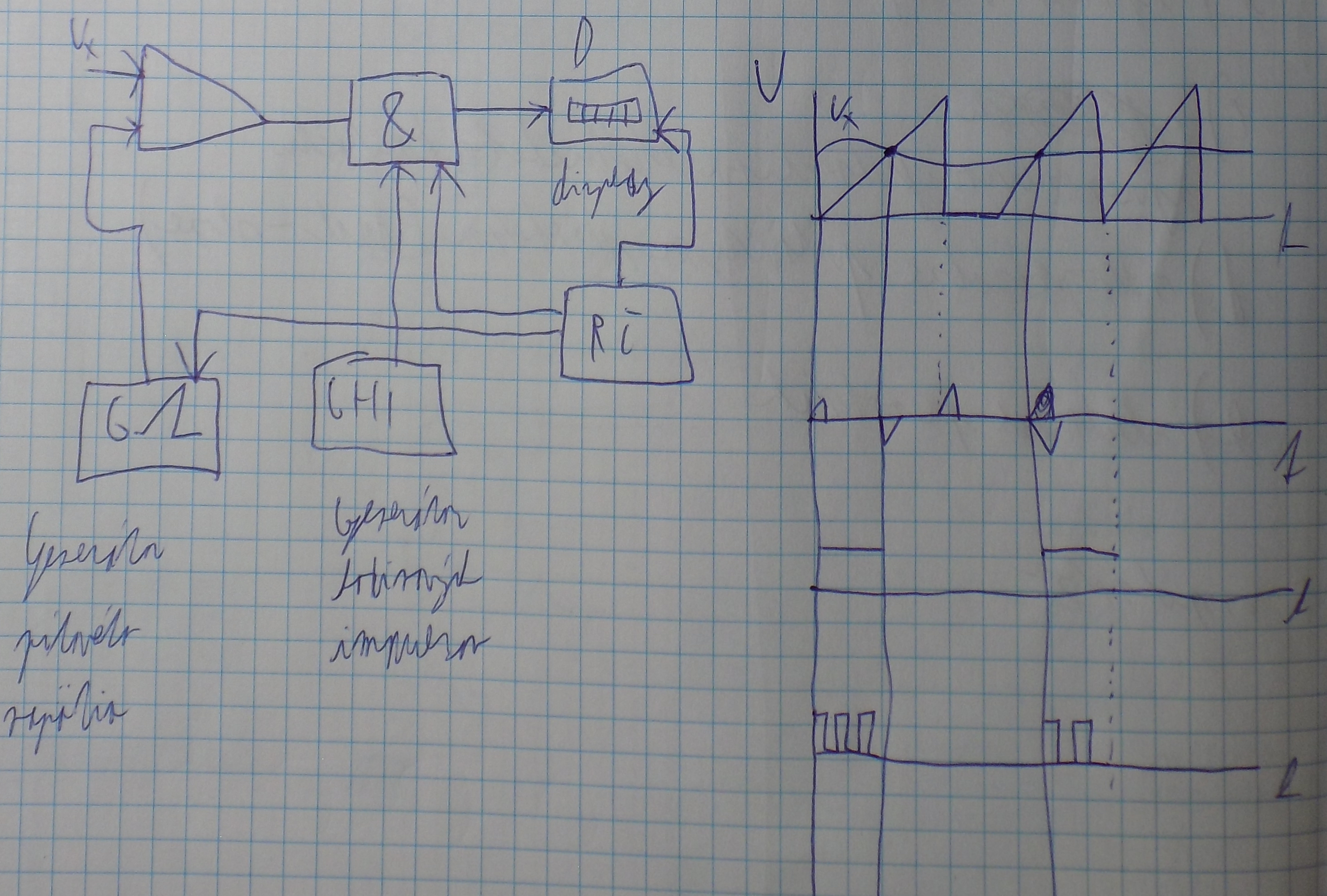
S pílovitým priebehom napätia 32
Pneumatické regulačné orgány 42
Hydraulické regulačné orgány 43
Kombinované spojité regulátory 49
Dvojpolohový nespojitý regulátor 51
Nespojité regulátory analogicky odvodené od spojitých 52
Jednoparametrové regulačné obvody 61
Rozvetvené regulačné obvody 63
Regulačné obvody s kompenzáciou dopravného oneskorenia 63
Regulačné obvody s pomocnou akčnou veličinou 64
Mnohoparametrové regulačné obvody 65
Stabilita regulačných obvodov 67
Metódy určujúce stabilitu regulačného obvodu 67
Návrh logického obvodu pomocou pevne programovateľného logického obvodu 73
Špecializácia
Vynachádzanie nástrojov, pričlenenie ich ku konkrétnej činnosti
Mechanizácia
náhrada manuálnej činnosti človeka strojom
najjednoduchší stroj: jednoduchá páka
neskôr koleso, z toho kladka
Automatizácia
náhrada riadiacej činnosti človeka strojom
Kybernetika – veda o optimálnom riadení rôznych systémov(biologických, technických, ekonomických, …)
optimálne pre určité podmienky
Teórie kybernetiky:
Kybernetických systémov
Kybernetických informácii
Kybernetických hier
Kybernetických algoritmov
Kybernetického riadenia
Metódy kybernetiky:
Metóda analógie
Metóda pokus a omyl
Metóda čiernej skrinky
Metóda blokových schém
Metóda modelovania
Vnútorne organizovaná množina vzájomne spojených prvkov
Podľa funkcie
riadiaci, riadený
Podľa charakteristických priebehov procesov
statický, dynamický
lineárny, nelineárny
Podľa časového priebehu veličiny
Výmena informácii medzi systémami
najmenšia jednotka je bit
väčšia je bajt – slovo
Skúma správanie systémov v komplikovaných situáciach, pripravuje systém na určitú situáciu
Algoritmus
jednoznačný postup riešenia úlohy s konečným počtom krokov končiaci vždy výsledkom
vyznačuje sa:
jednoznačnosťou
hromadnosťou – môže riešiť mnoho úloh rovnakého typu
presumptívnosť – po konečnom počte krokov nasleduje výsledok
determinovanosť
zapisuje sa graficky a pomocou programov
Riadenie:
cieľavedomá činnosť
nadriadený(riadiaci) člen pôsobí na podriadený(riadený) člen
pôsobí za účelom dosiahnuť vytýčený cieľ
Založená na určitej podobnosti
Na začiatku sa zvolí náhodný postup
Všetky výsledky sa zaznamenávajú
Kladné výsledky určujú ďalší smer postupu
Nie je dôležitá štruktúra, ale vstupy a výstupy
Čiernou skrinkou je každé zariadenie, ktorého štruktúra(konštrukcia) nás nezaujíma, ale zaujímajú nás len vstupy a výstupy
Model:
zväčšenina alebo zmenšenina origináli
slúži na študovanie originálu
Rozdelenie:
fyzické
grafické
matematicko-fyzikálne
správania
štruktúry
klasifikuje sa podľa kritérií:
ak sa informácia vyhodnocuje:
okamžite pomocou spätnej väzby -> regulácia
bez okamžitej spätnej väzby -> ovládanie
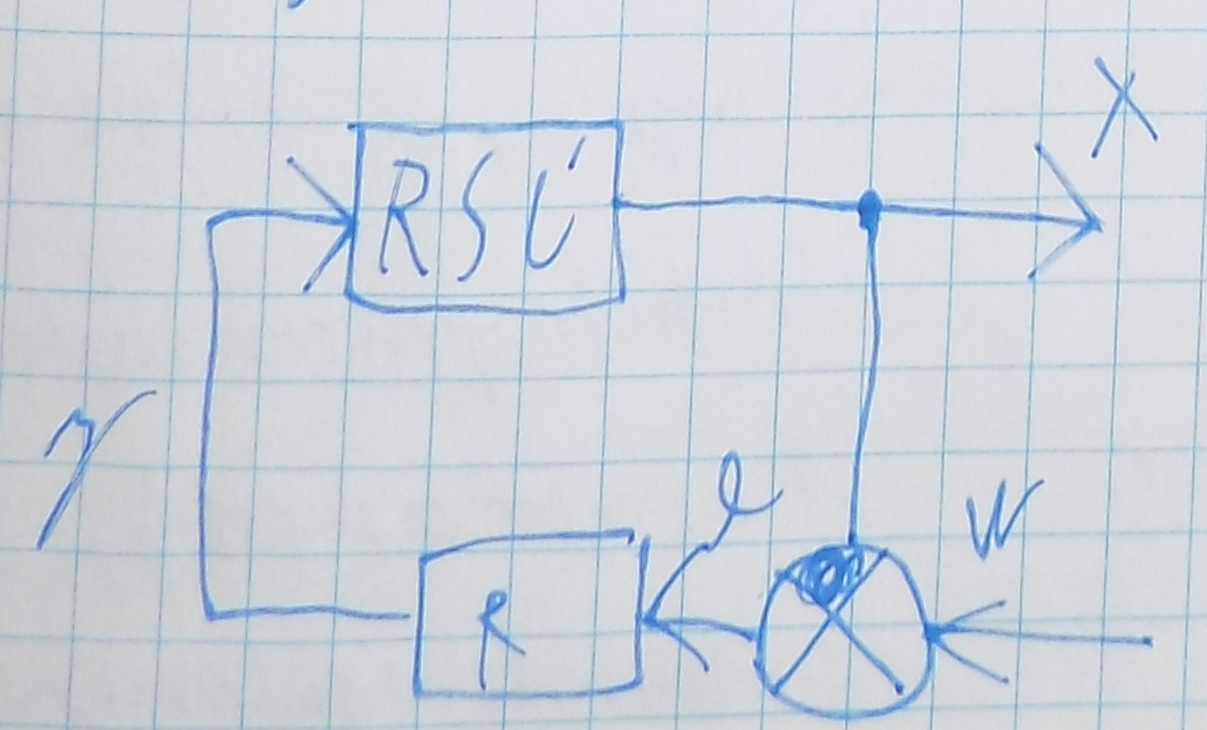
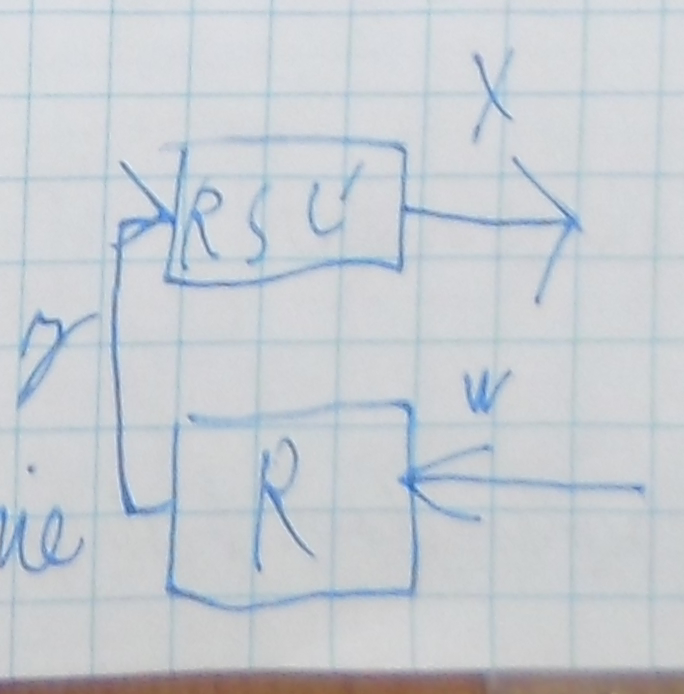
RSÚ: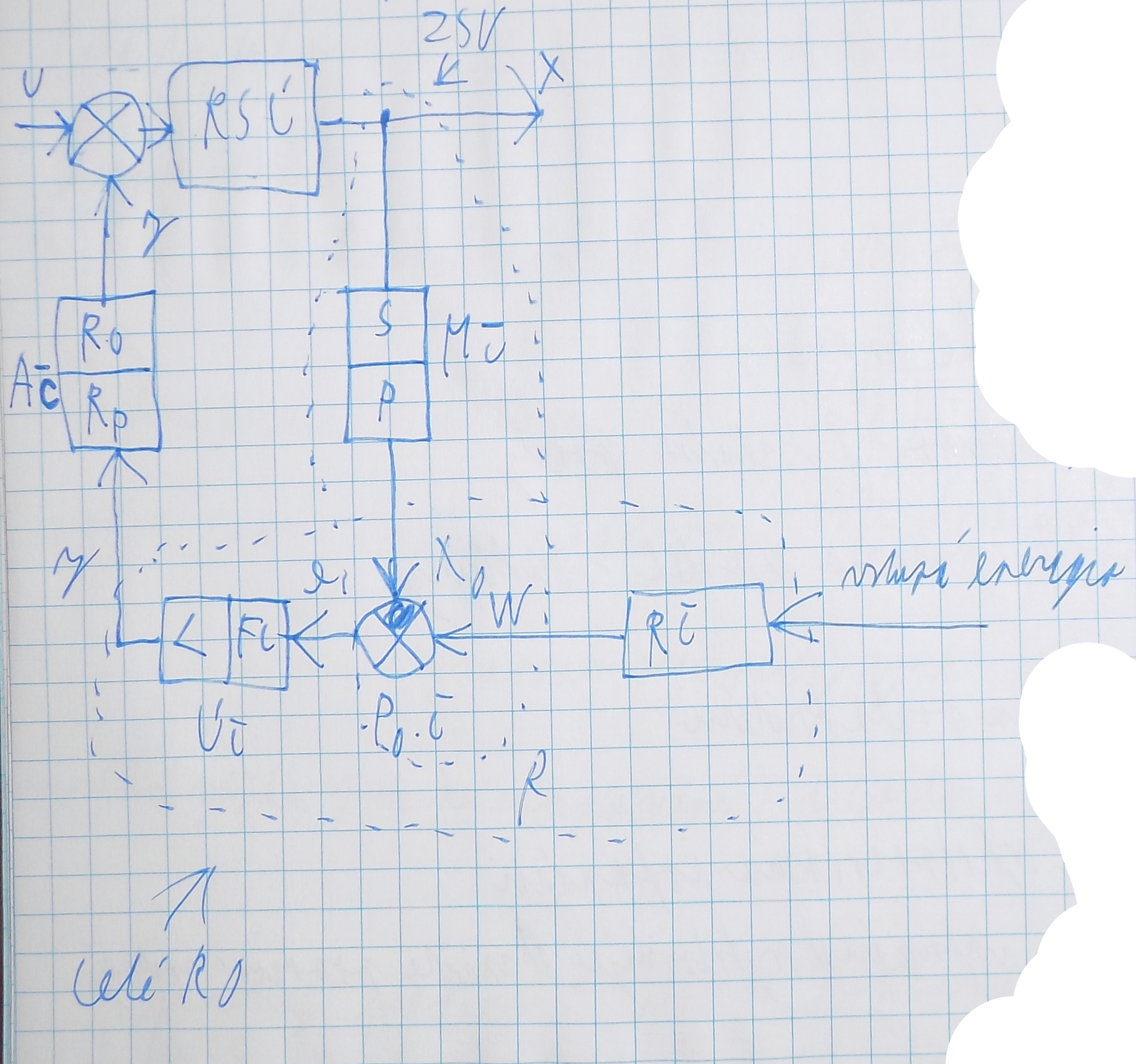
RSÚ – regulovaná sústava
R – regulátor
X – výstupná, regulovaná veličina
W – požadovaná hodnota, riadiaca veličina
ρ – regulačná odchýlka
Y – vstupná veličina, akčná, vykonáva zásah
sv – spätná väzba
ZRS – základná regulačná schéma
M.Č – merací člen, meria okamžitú hodnotu meranej veličiny(x)
S – snímač, sníma okamžitú hodnotu meranej veličiny
P – prevodník, mení jednu fyzikálnu veličinu na druhú
R.Č. – riadiaci člen, slúži na nastavenie požadovanej hodnoty(W)
Po. Č - porovnávací člen, porovná okamžitú hodnotu regulovanej veličiny(x0) s požadovanou hodnotou(W), výstup je odchýlka (e), vyfarbená časť je to kde vstupuje X0, e = W - X0
Ú.Č. – ústredný člen, vo F.Č. sa prepočíta odchýlka(e)
< - zosilňovač
R – regulátor, skladá sa z ústredného, porovnávacieho a vstupného člena, vykonáva postupnosť zásahov do regulovanej sústavy na základe spätnoväzobnej informácie pri zabezpečení kvality a stability regulačného obvodu
A.č. – akčný člen, zosilnená upravená odchýlka vstupuje do akčného člena(A.č.), ktorý pomocou regulačného pohonu(Rp)[motor] prestaví regulačný orgán(Ro)[ventil]
U – poruchy okolia sústredené v 1 mieste, vstúpia do sčítacieho člena
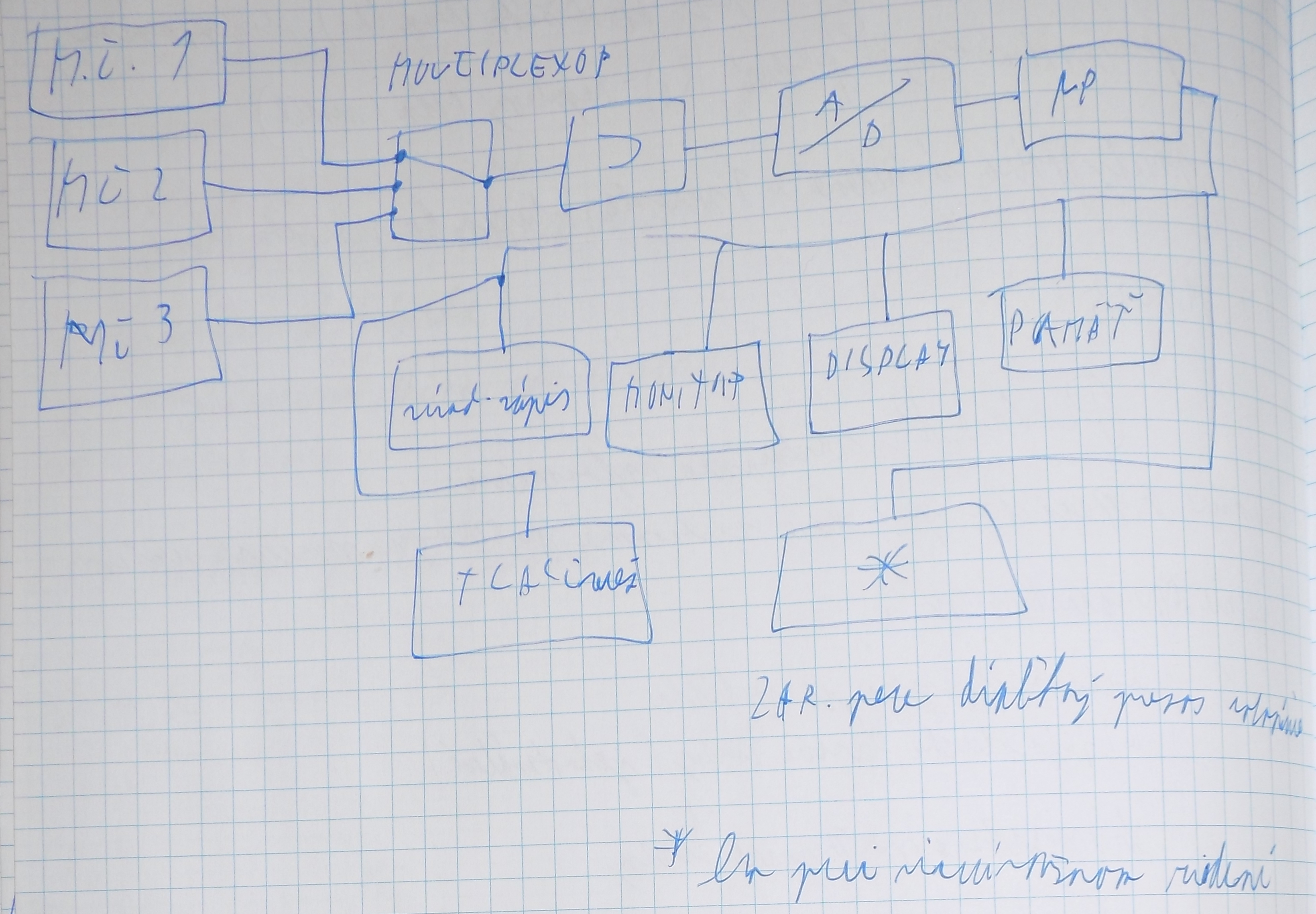
Informácie o meranom procese získame pomocou meracích sústav
Delenie meracích sústav:
podľa počtu meraných veličín:
jednokanálové meracie sústavy(jednoduché)
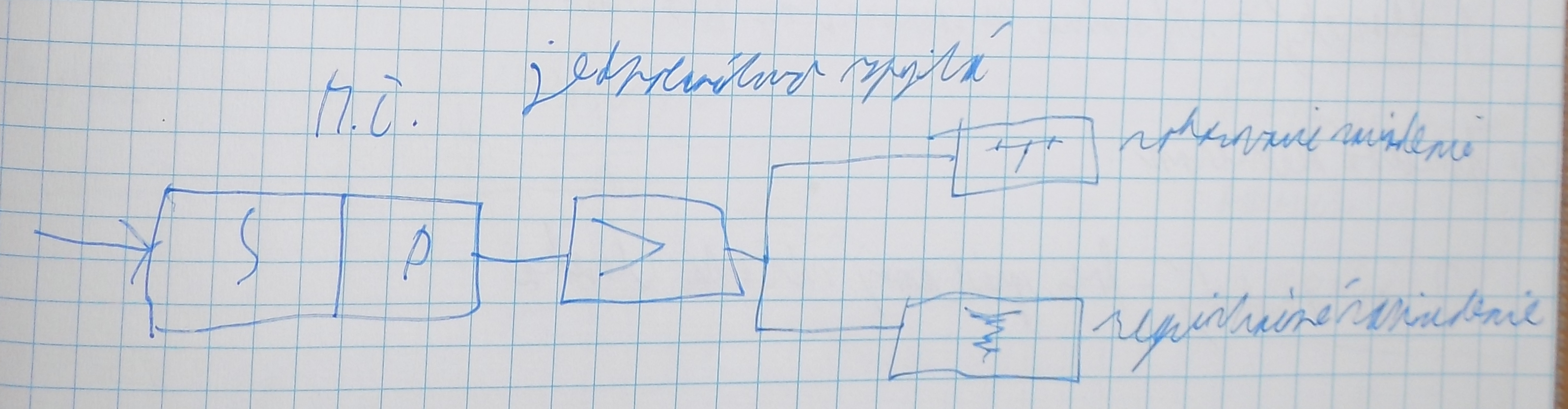
viackanálové meracie sústavy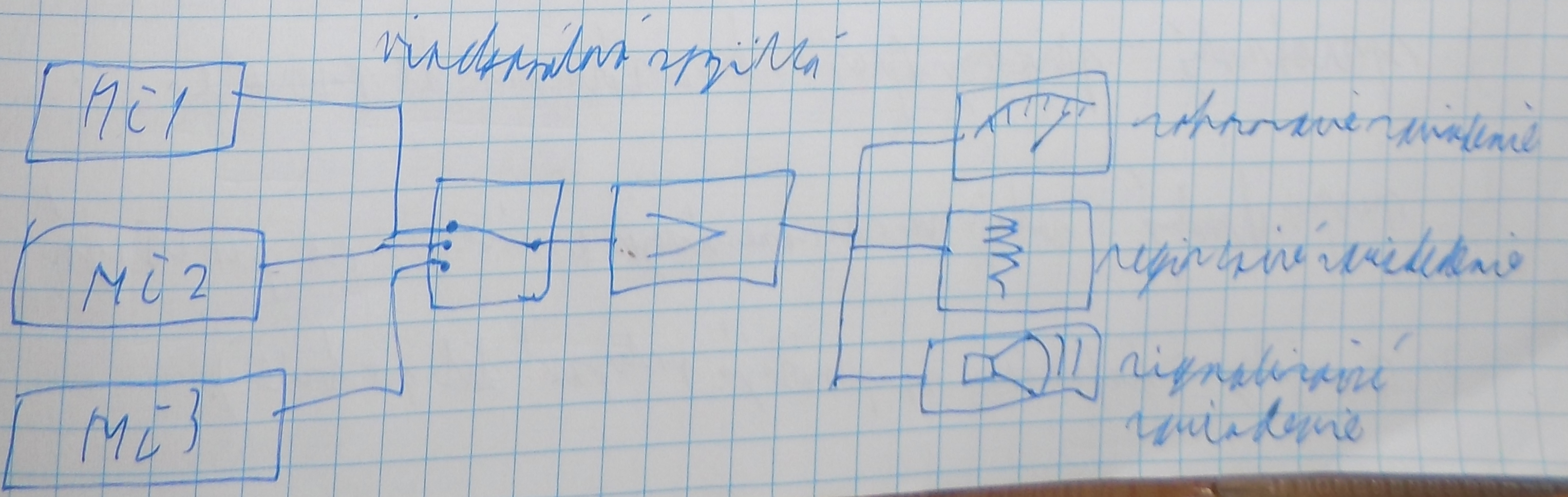
podľa časovej spojitosti signálu
spojité meracie sústavy
nespojité meracie sústavy
Môže byť:
Klasický – informácia sa zaznamená na pamäťové médium a na miesto určenia je doručená kuriérom
Automatický – bez priamej účasti človeka
Spriahnutý – priamy prenos bez záznamu do pamäte
Nespriahnutý – údaje sa zaznamenávajú a súčasne sa prenášajú
Spojitý – informácia sa prenáša bit po bite
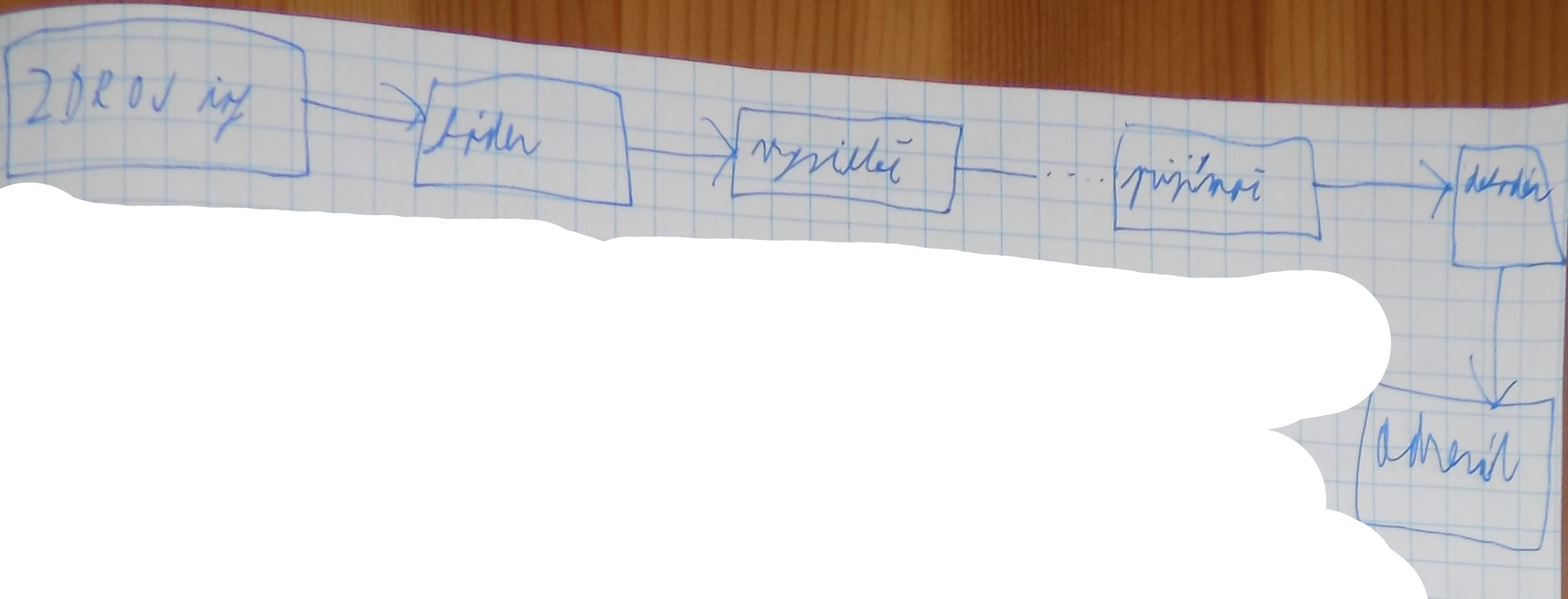
Nespojitý – informácia sa prenáša po viacerých bitoch zároveň?
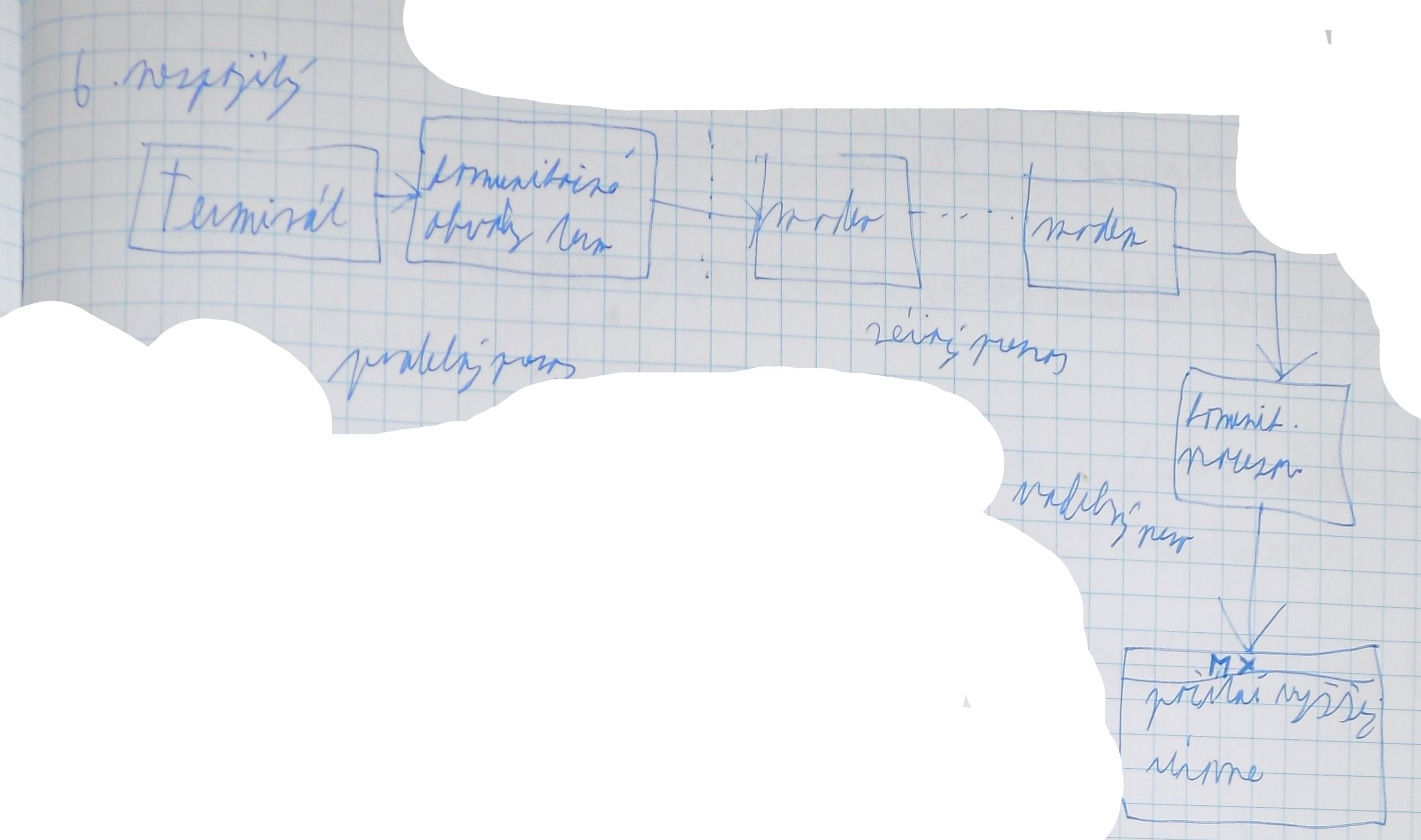
Káblový prenos:
metalické káble
optické káble
Bezkáblový prenos:
satelit
Wi-Fi
Bluetooth
IRDA
NFC
Potrubný
1. zmienka – Karel Čapek – R.U.R.
umelá inteligencia – 1950 Alan Turing
teória robotov skúma a popisuje rôzne javy z oblasti robotov
Rozdelenie:
manipulátor:
jednoduchší ako robot, slúži na manipuláciu s predmetmi a má jednoduchší riadiaci systém
teleoperátor:
zosilňuje a na diaľku prenáša potrebné pohyby od človeka
robot
počítačom riadený integrovaný systém schopný automaticky vykonávať rôznorodú činnosť v závislosti od vonkajšieho prostredia a inštrukcii človeka
priemyselné automatické
majú manipulačnú schopnosť
automatická činnosť
univerzálnosť
ľahká zmena programu
spätná väzba
priestorová sústredenosť
kognitívne
schopnejšie(inteligentnejšie)
vnímajú a rozpoznávajú prostredie
vytvárajú a priebežne prispôsobujú vnútorný model prostredia
na základe bodu 2. a 3. sa samy rozhodnú o ďalšej činnosti
ovplyvňujú prostredie, manipulujú s predmetmi, pohybujú sa v prostredí
humanoidné
nahradia človeka pri nejakej činnosti
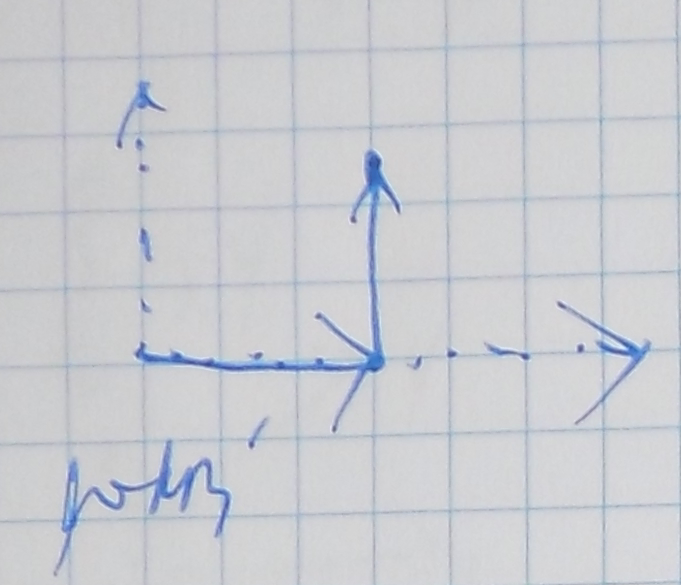
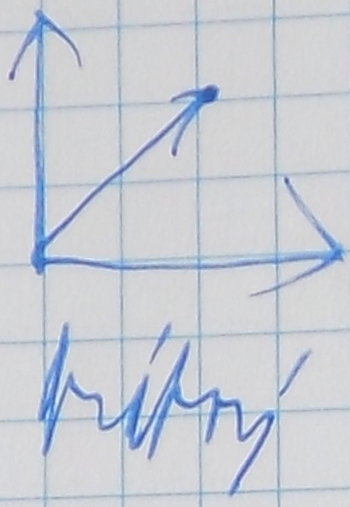
dá sa nakresliť 4 časťami
Z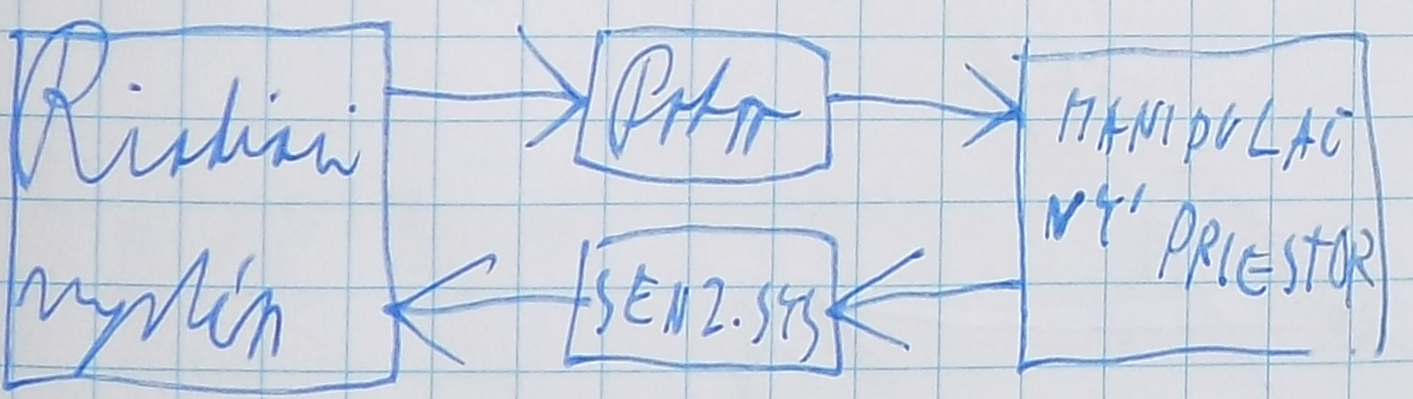 ákladné
časti:
ákladné
časti:
Manipulačný mechanizmus
stojan s ramenom
ruka
chápadlo(technická hlavica), napríklad kliešťová, elektromagnetická, prísavková
Unimate:
Versatran:
ASEA:
IBM:
Pohonný systém
mechanické pohony
pneumatické pohony
hydraulické pohony
elektrické pohony:
krokové
rovnomerné servopohony
striedavé otočné servo motory
senzorový systém
dotykové senzory
bezdotykové senzory – identifikácia predmetu v priestore(ultrazvuk, laser, optoprvok)
silové a momentné – preťaženie robota
robovízne – slúžia na určovanie polohy robota
snímanie teploty
riadiaci systém
koordinovaná činnosť robota
zabezpečujú testovanie jednotlivých častí robota(ochrana voči havárii)
tvorený:
mikroprocesorom
počítačom
mikropočítačom
riadenie(pohyb)
bodové – dráha robota z bodu do bodu, lomená kategória
dráhové – programuje sa súčasne vo všetkých smeroch, výsledok je plynulý pohyb
Postup:
Naprogramovať manipulačný cyklus robota – postupnosť krokov, ktoré bude robot(riadiaci systém) vykonávať
Optimalizovať manipulačný cyklus(dráha, čas)
Zaviesť program
Odladiť program po syntaktickej a logickej stránke
Manipulačný cyklus – programujeme:
Polohu pohybovej osi robota – odkiaľ kam sa má dostať
poloha osi:
Odhadom
Výpočtom
Predvádzaním?
Programuje sa rýchlosť pohybu(len na robotoch kde sa to dá)
Zrýchlenie pohybu v danom smere
naprogramujeme čas za ktorý robot dosiahne určitú rýchlosť
Programujeme časové oneskorenie
Programátor stanoví časový interval, počas ktorého robot nič nevykonáva
Čaká na ukončenie inej technologickej operácie
Programovanie vonkajších udalostí
Programujeme ovládanie iných zariadení pomocou riadiaceho systému robota
Určíme sled jednotlivých úkonov
Počítačom riadené stroje
Používajú sa pri automatizovaných prevádzkach
Nižšia cena oproti robotom
Nižšie náklady na kvalifikáciu pracovníkov zabezpečujúcich údržbu a obsluhu
Pružné, možno ich rýchlo prispôsobiť zmeneným potrebám
Napr:
Frézka
Vŕtačka
Sústruh
Vývoj:
Začal v roku 1954
Generácie:
elektrónka, relé
polovodič
integrovaný obvod
mikrokontrolér (MCU)
Štruktúra:
Obrábací mechanizmus
Riadiaci systém s pamäťovými obvodmi
Ovládací panel
Typy riadenia:
OFF-LINE(otvorené)

O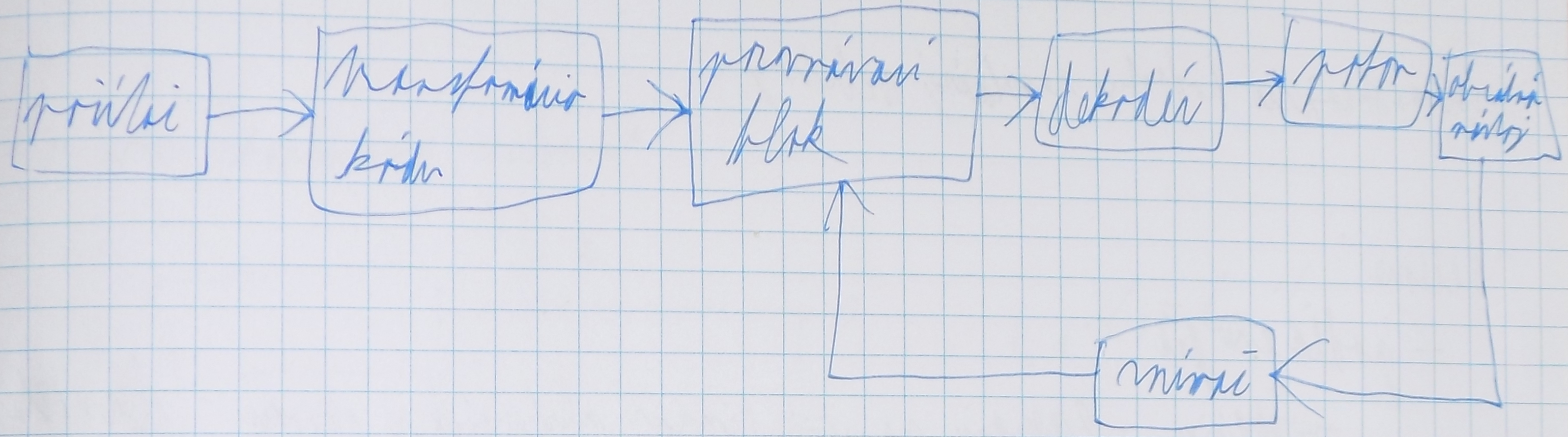 N-LINE
N-LINE
ADAPTÍVNE
Riadenie pohybu:
Bodové riadenie
Point to point
Medzi 2 bodmi po najkratšej dráhe
Vŕtačka
Pravouhlé riadenie
Straight
Pohyb nástroja je definovaný dráhou v pravých uhloch
Obrysové
Sústruh?
Súvislé riadenie
Contour
Pohyb nástroja je definovaný dráhou, ktorou kopíruje napr. obrys obrábanej súčiastky
Frézka
Delenie
Podľa energie:
Aktívne
energiu na svoju činnosť získavajú z obvodu
termočlánok
Pasívne
energiu potrebujú dodať
termistor
Podľa snímanej veličiny
snímač teploty
snímač rýchlosti
snímač tlaku
snímač pružnosti
snímač svietivosti
snímač vlhkosti
snímač …
Podľa spôsobu snímania
Kontaktné
Bezkontaktné
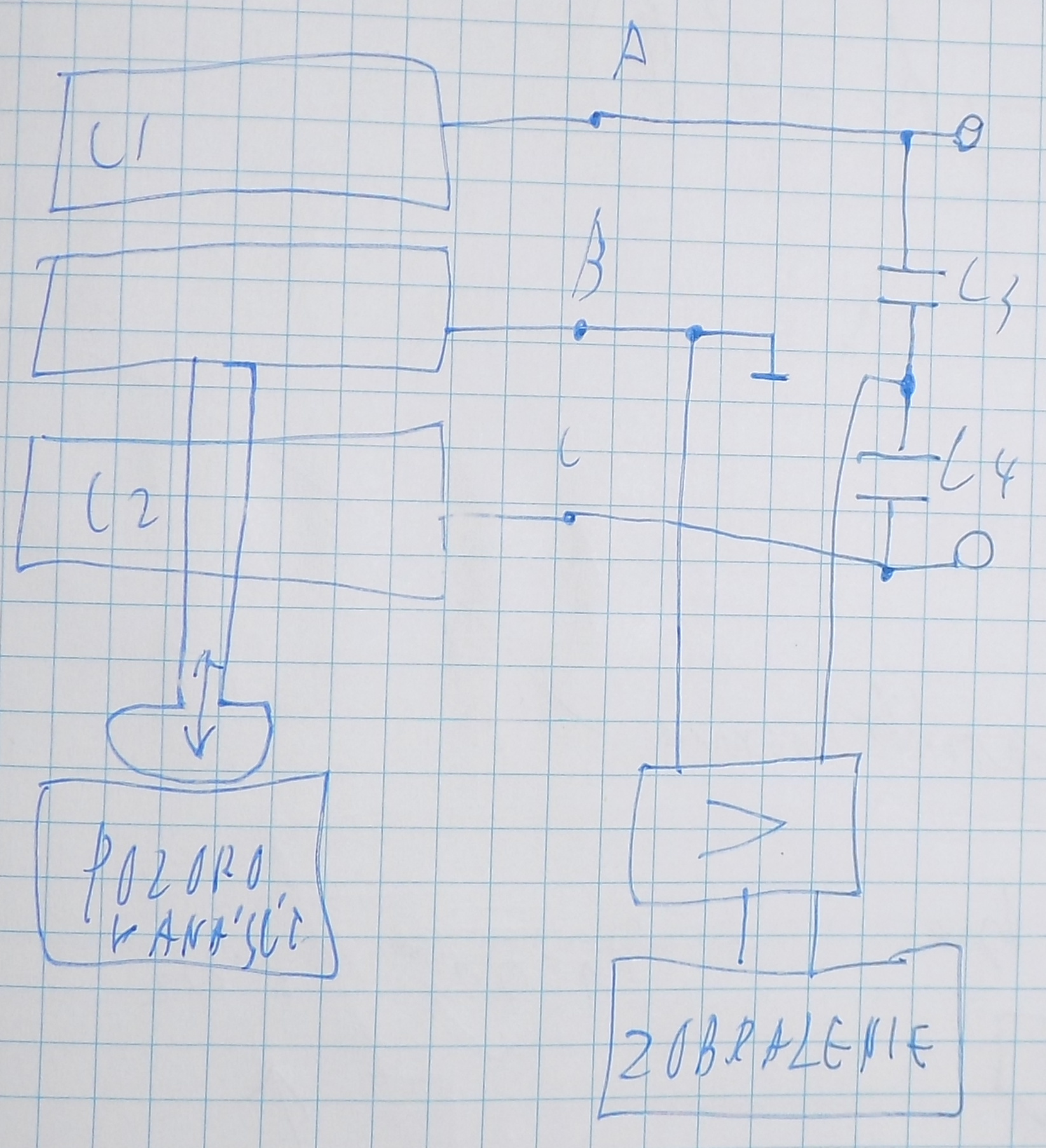 C1
* C4 = C2 * C3
C1
* C4 = C2 * C3
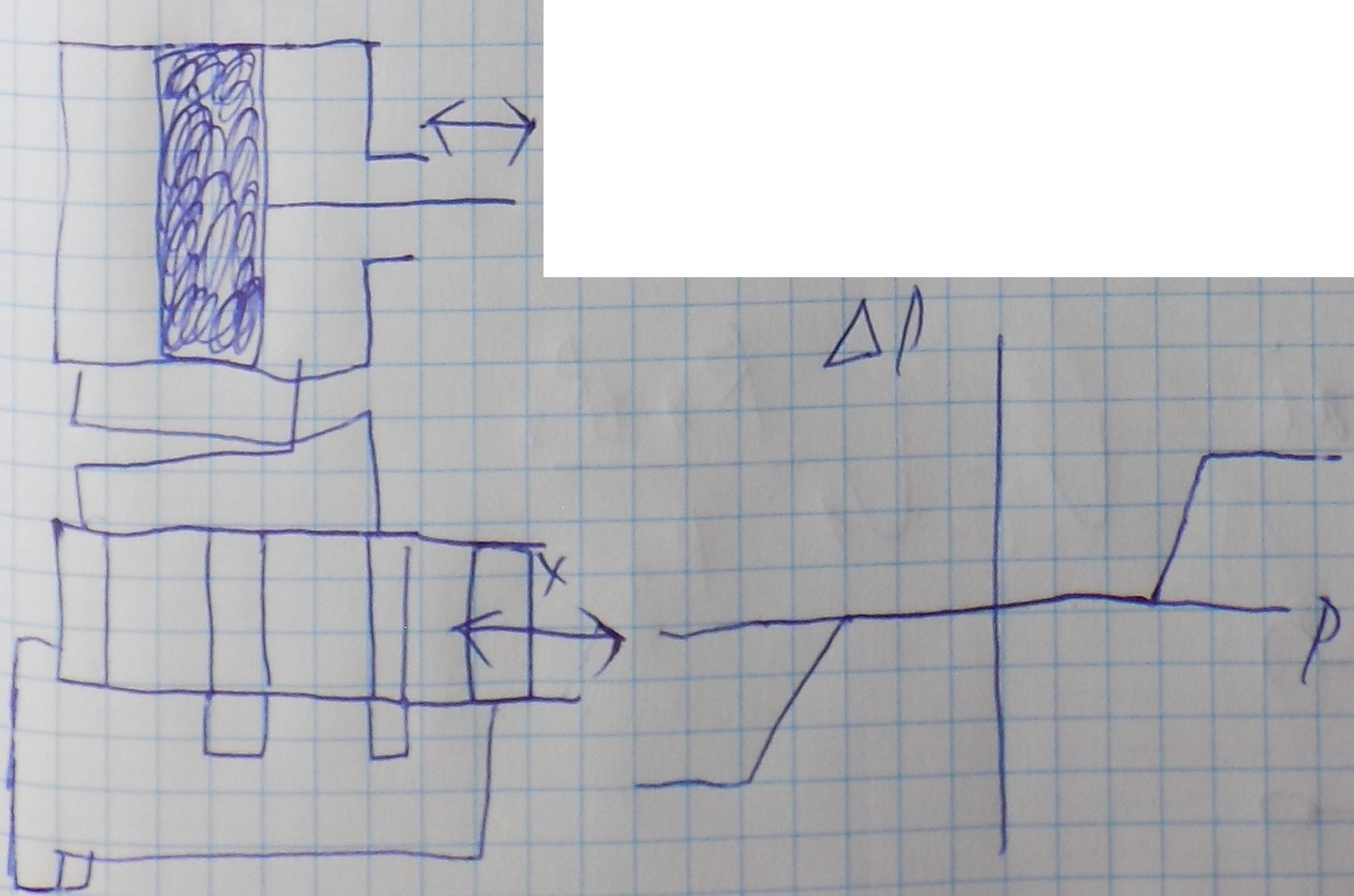
C1 = εr*ε0*((S)/(d – Δd))
Pozorovaná súčiastka je veľká, alebo malá
Stredná plošina sa hýbe
Svieti buď 1. alebo 2. LED ka(či je veľká alebo malá)
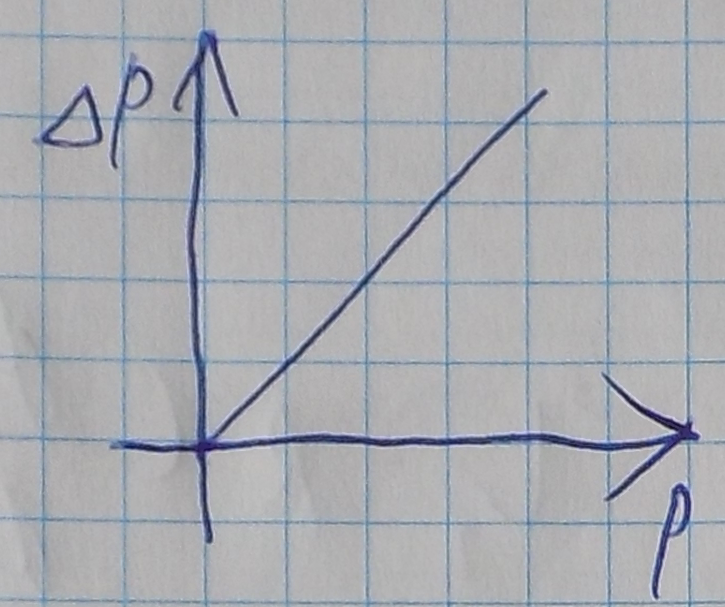
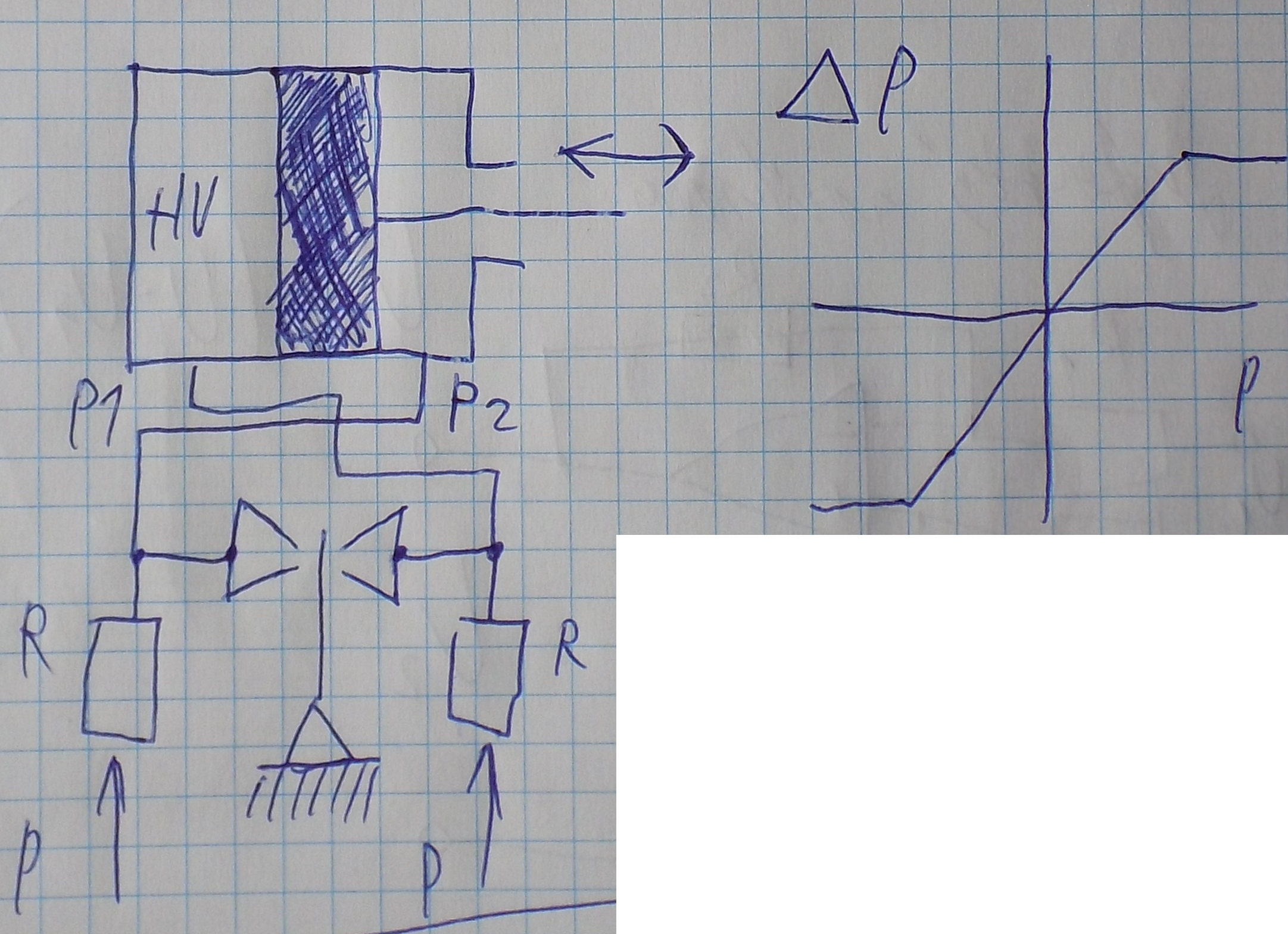
U manometer
Δ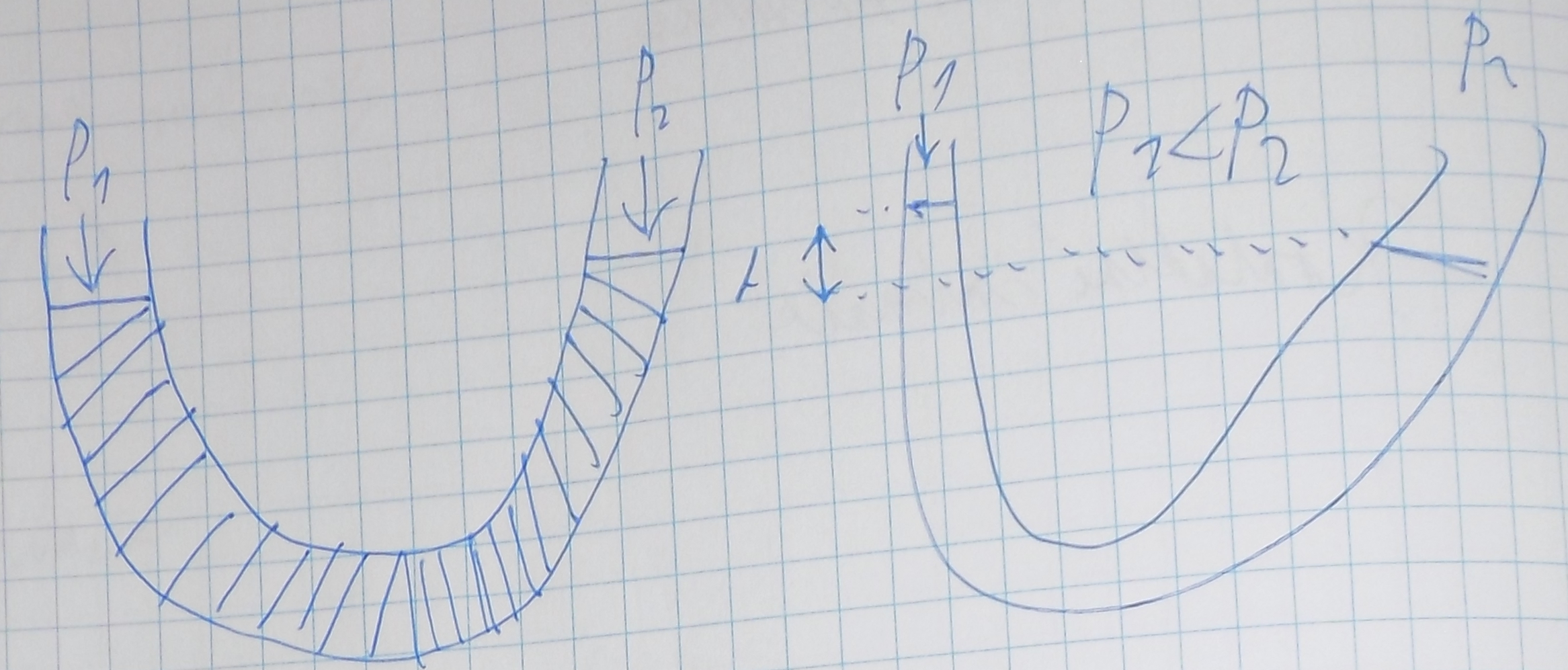 P
P
P = ρ * g → h = P/(ρ*g) →h=f(P)
Prekážka v potrubí o známom priemere
Clona Dýza
Rovnica spojitosti
v1 * s1 = v2 * s2
Bernouliho rovnica:
V12/(2*g) + (P1/(ρ*g)) = V22/(2*g) + p2/ρ*g
C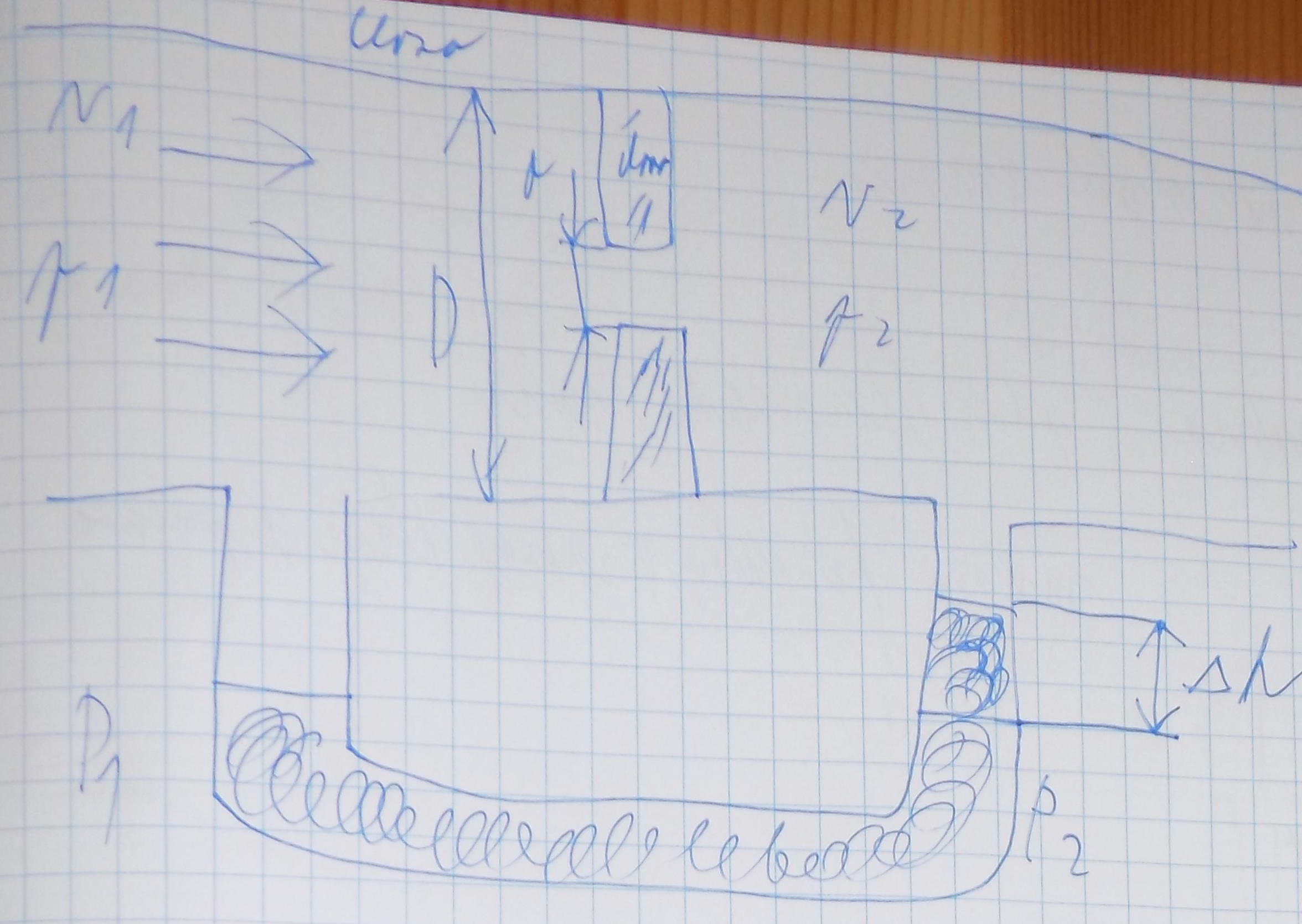 lona
lona
Dýza
Ďalšie typy prietokových snímačov
Prandtova trubica
Platí Bernouliho rovnica
sústava kanálikov so známou dĺžkou a priemerom
Venturiho trubica
Rotameter
Počet otočení
vrtuľky určuje prietok kvapaliny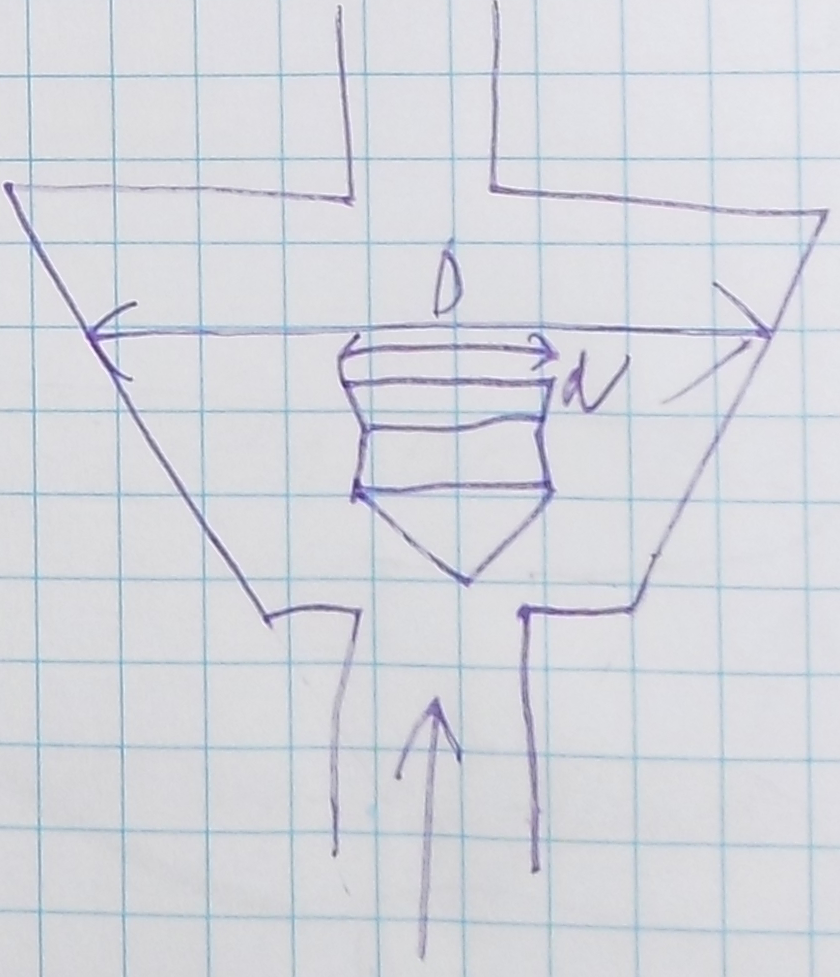
Otočenia sa prepočítavajú na objem, ktorý pretiekol
Je to na základe rozdielu priemerov
n = (π/4) * (D2 – d2)
Q * v = objem kvapaliny
Q * v = k * (D – d)
(D – d) = prietok
Snímače teploty – bimetál Fe – Ni, Cu – Ni
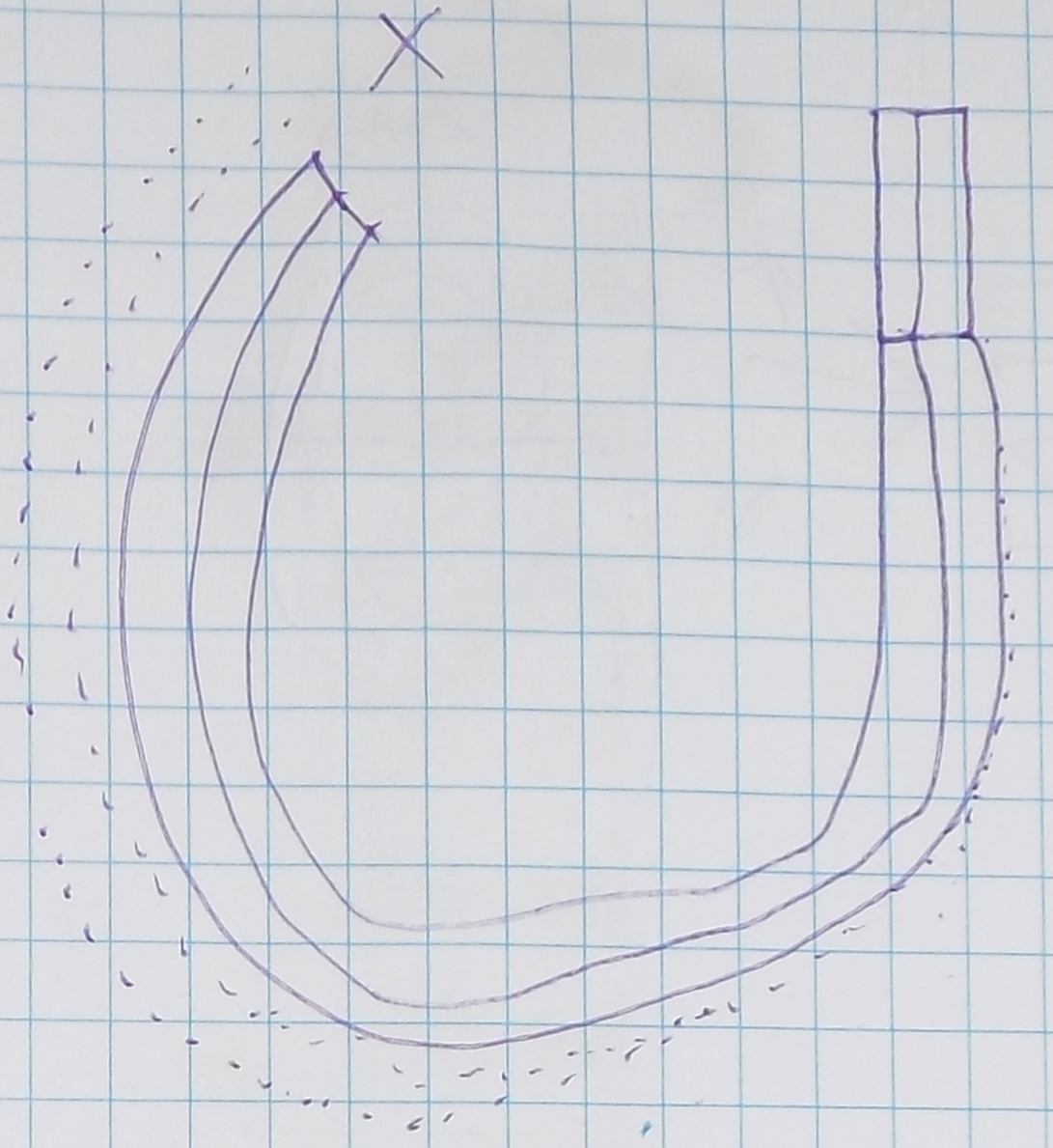
Tlakové snímače
Tvrdá membrána
M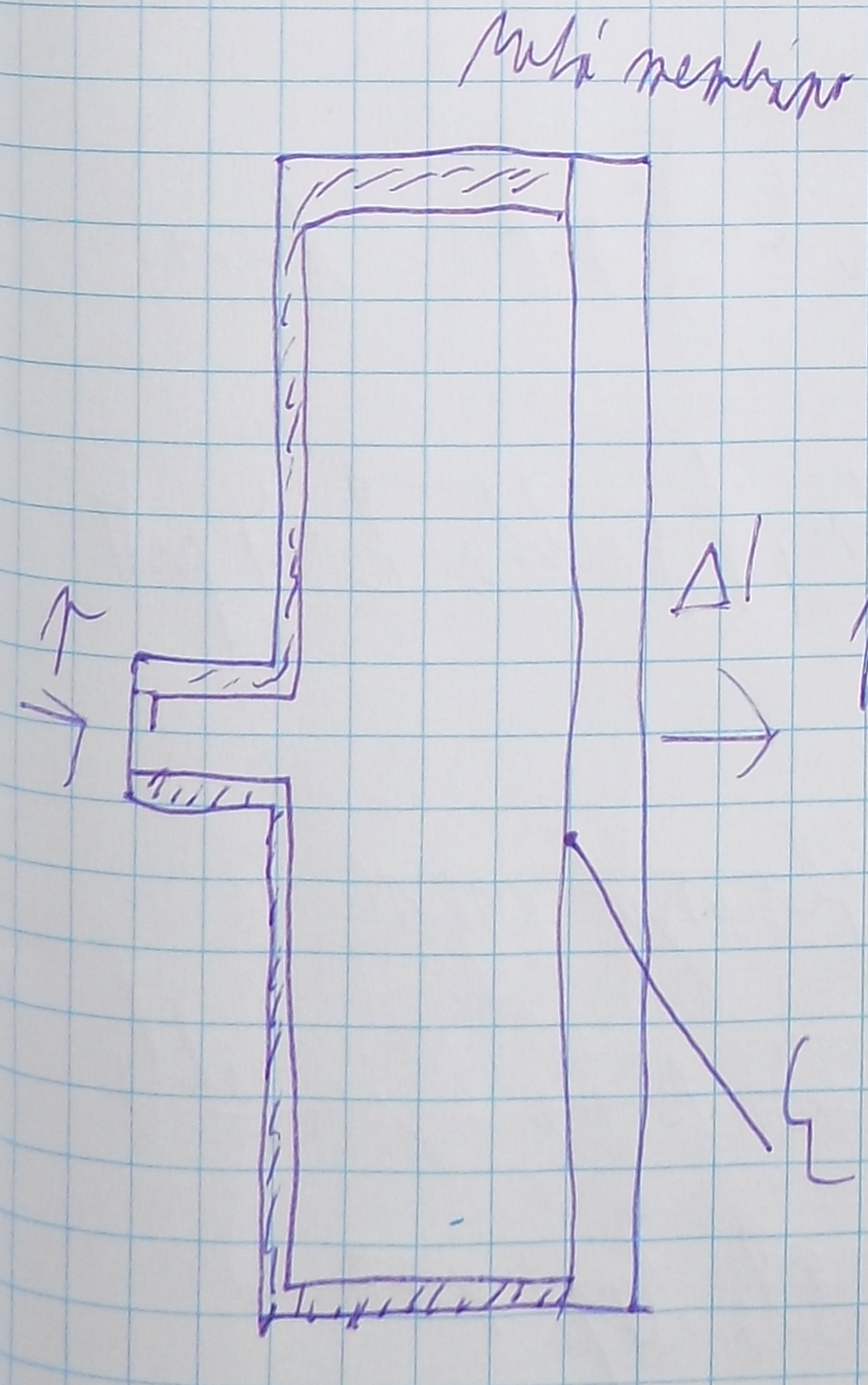 äkká
membrána
äkká
membrána
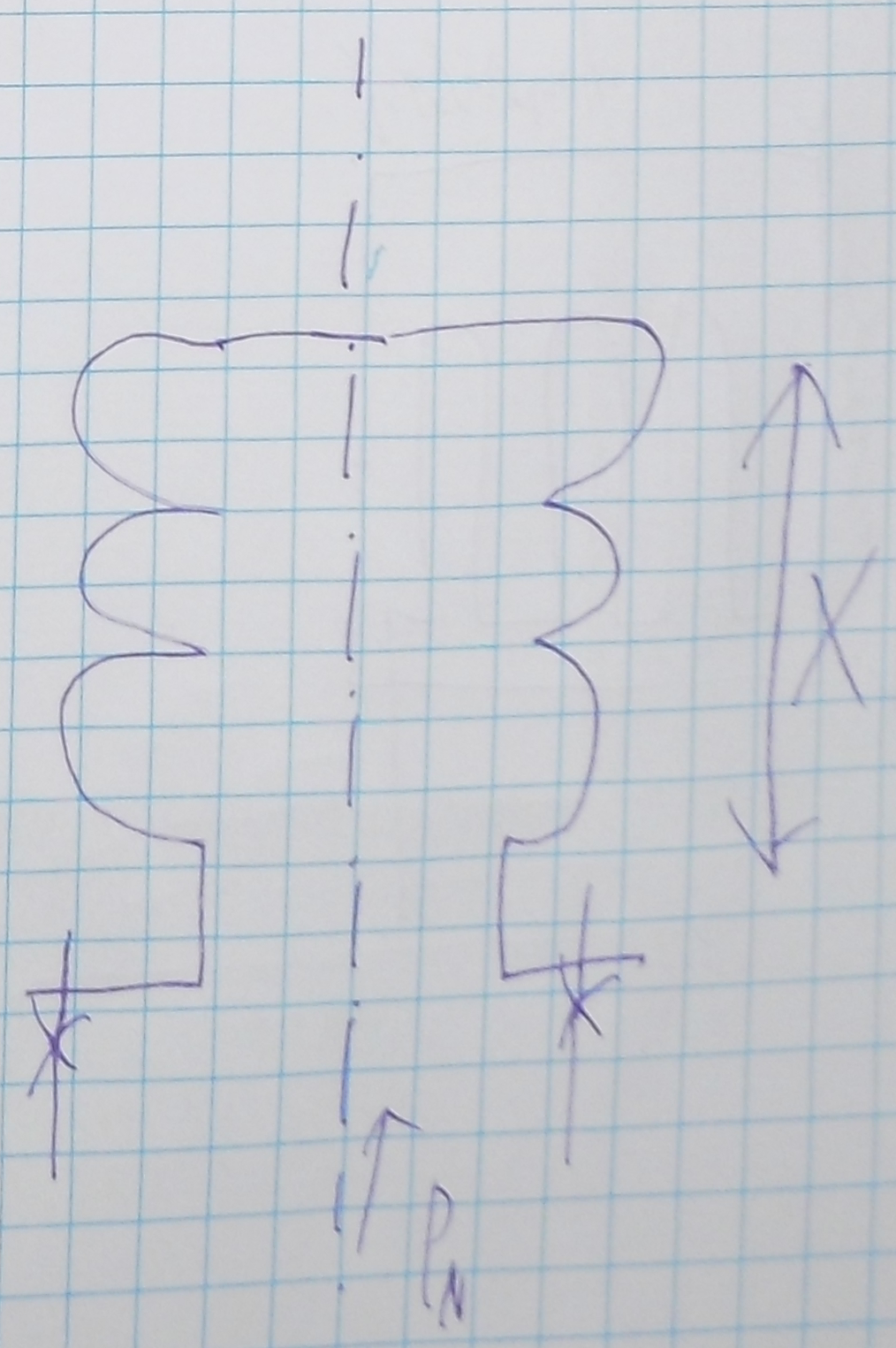
V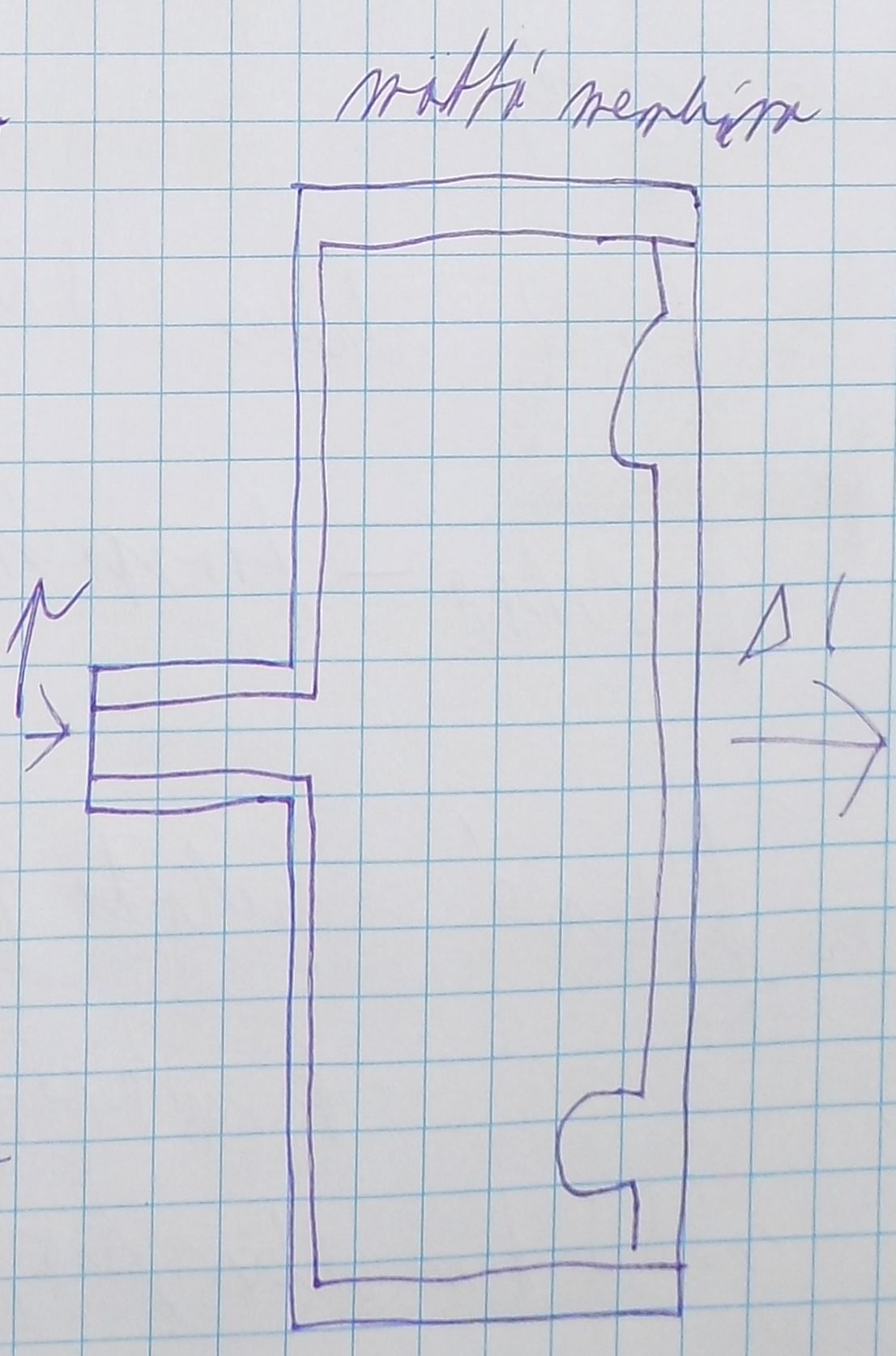 lnovec
lnovec
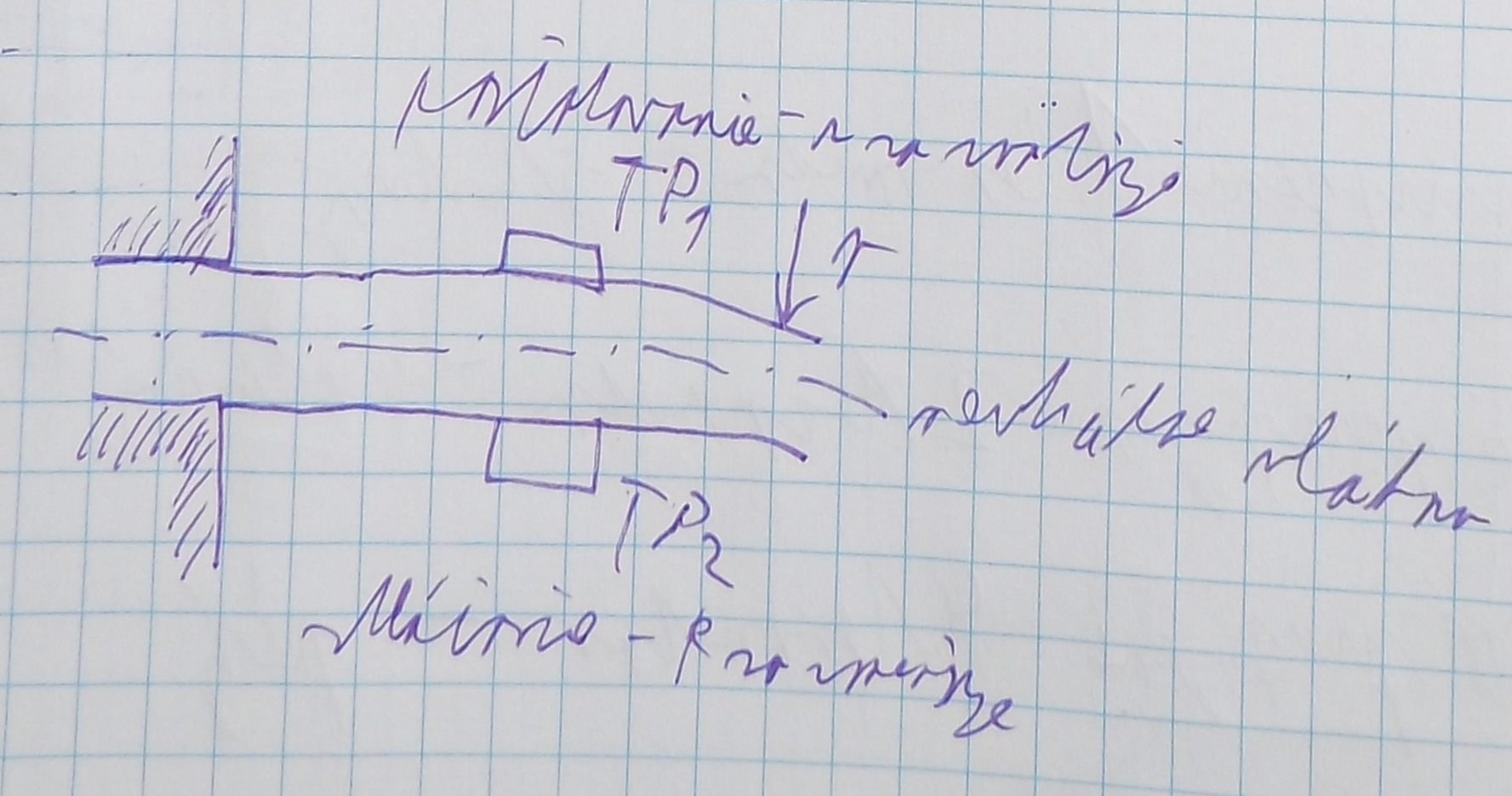
Odporové deformačné snímače
Tenzometre
Snímajú deformáciu na základe zmeny odporu
Typy:
Kovové
Zliatina Karma (Ni Cr Fe Al)
Drôtikové
Zliatina Konštantán
Hrúbka 2 – 4 µM
Fóliové
Metóda plošných spojov
Polovodičové
kremíkové
v tvare tyčiniek
50 krát citlivejšie
teplotne závislé
len pre laboratórne a kontrolné merania
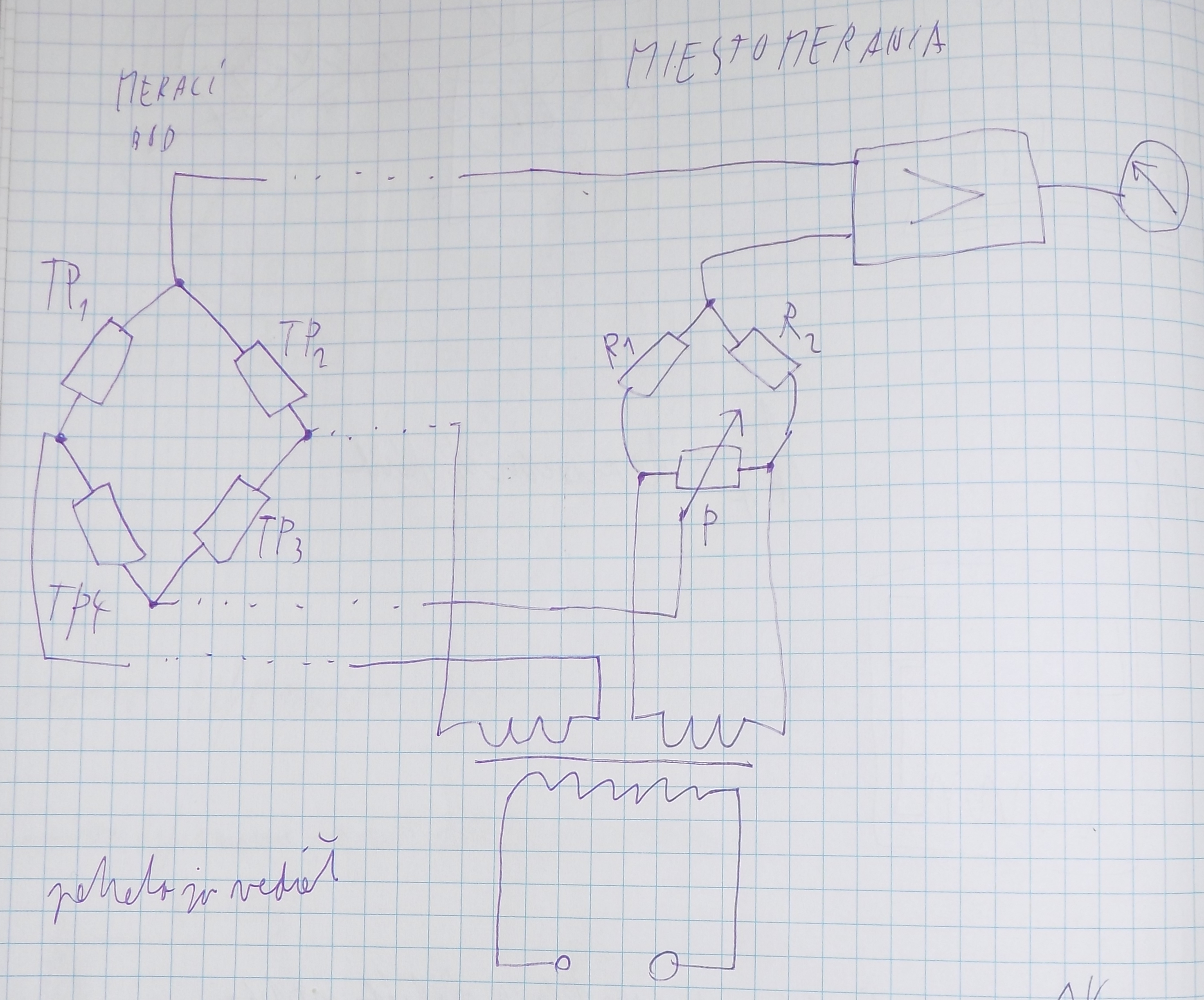
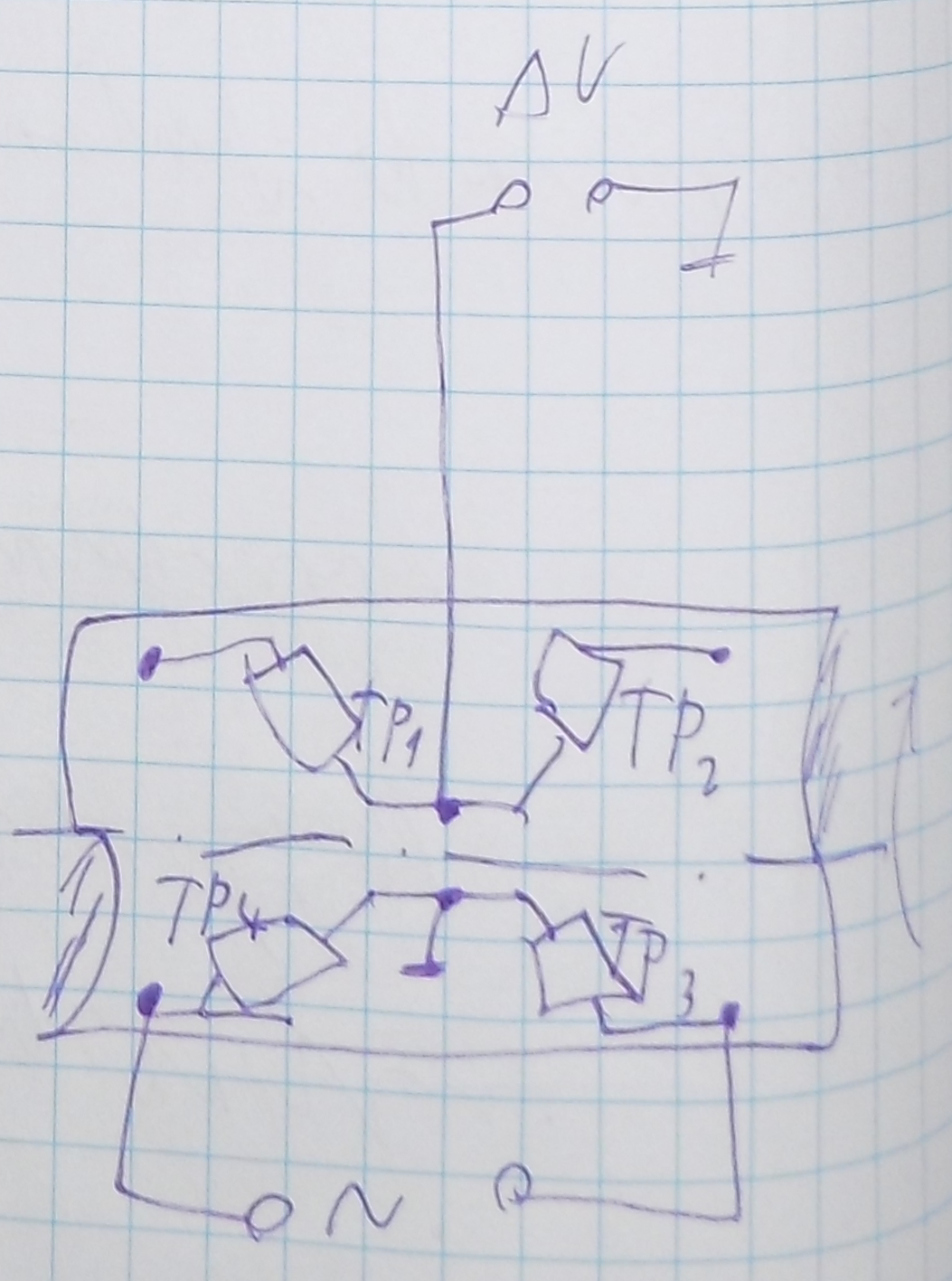
tp – tenzometrický prvok
Ružice:
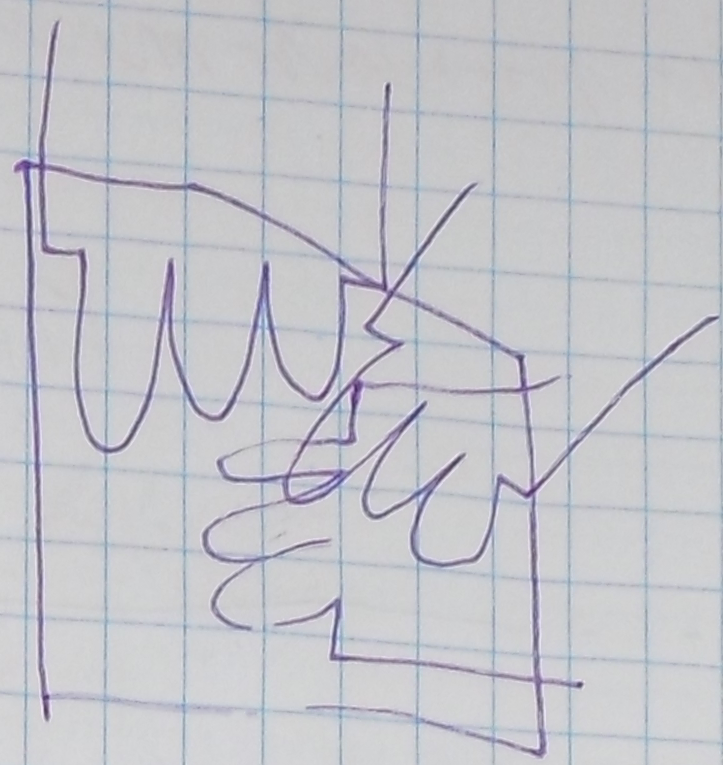
Zapájajú sa do štvrťmostíka, polmostíka a úplného mostíka:
3 vodiče 1 tenzometer – štvrťmostík
3 vodiče 2 tenzometre – polmostík
4 vodiče 4 tenzometre – plný mostík
Meranie na vzdialenom mieste pomocou tenzometrických snímačov
pomocou pomocného mostíka
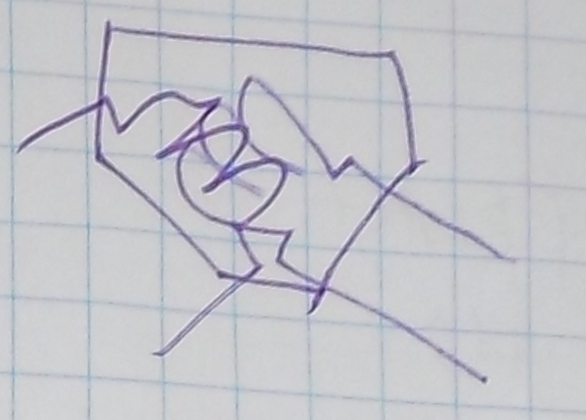
T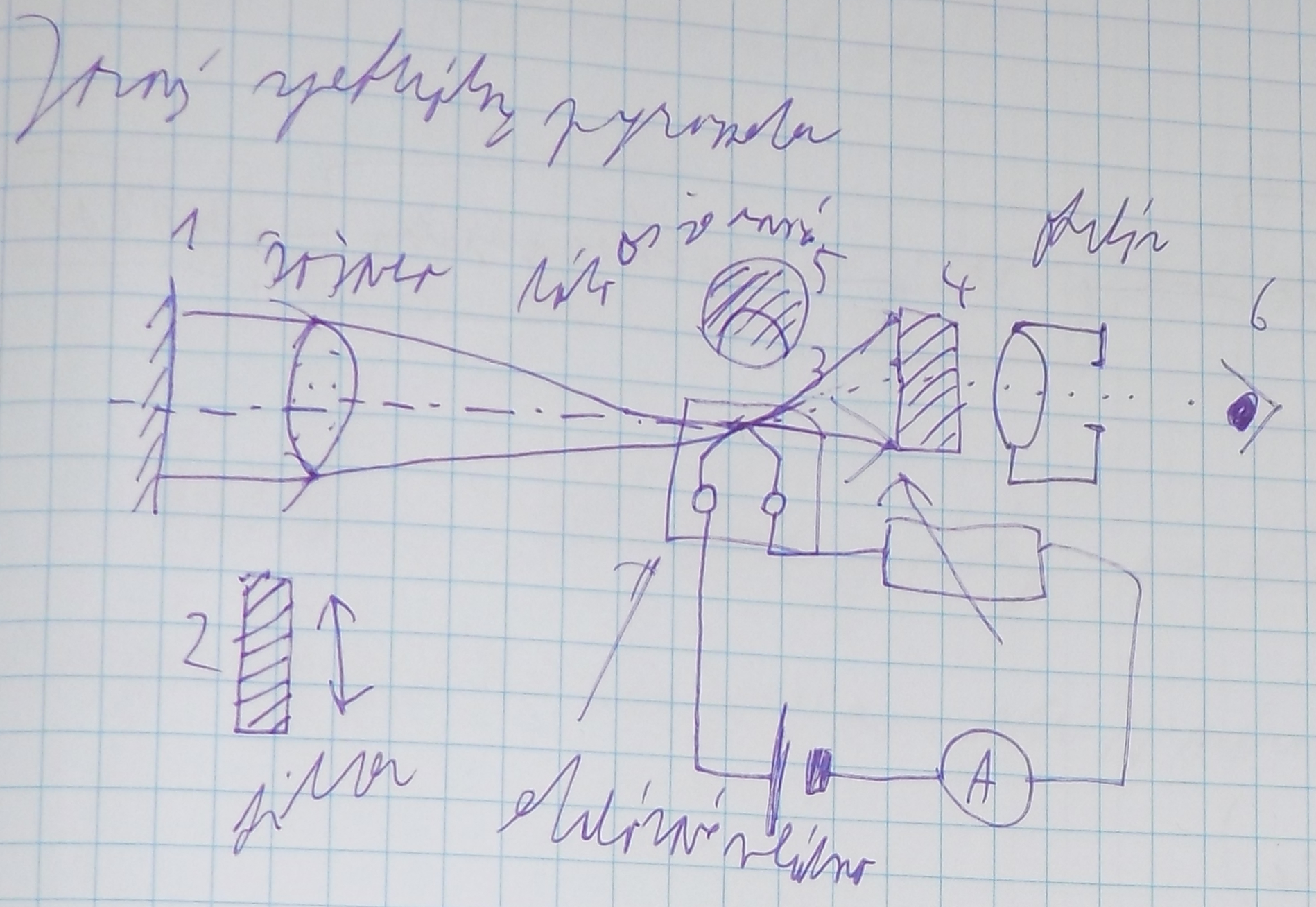 eplotu
meriame na meranom mieste
eplotu
meriame na meranom mieste
Optický filter
Žhavené etalónové vlákno žiarovky
Optický filter
Okulár s otočným prvkom(nastaviteľným kolieskom), slúži na nastavenie teploty
Oko
Ďalšie zariadenia snímajúce teplo
termokamera
termovízia
fotoelektrické snímače
v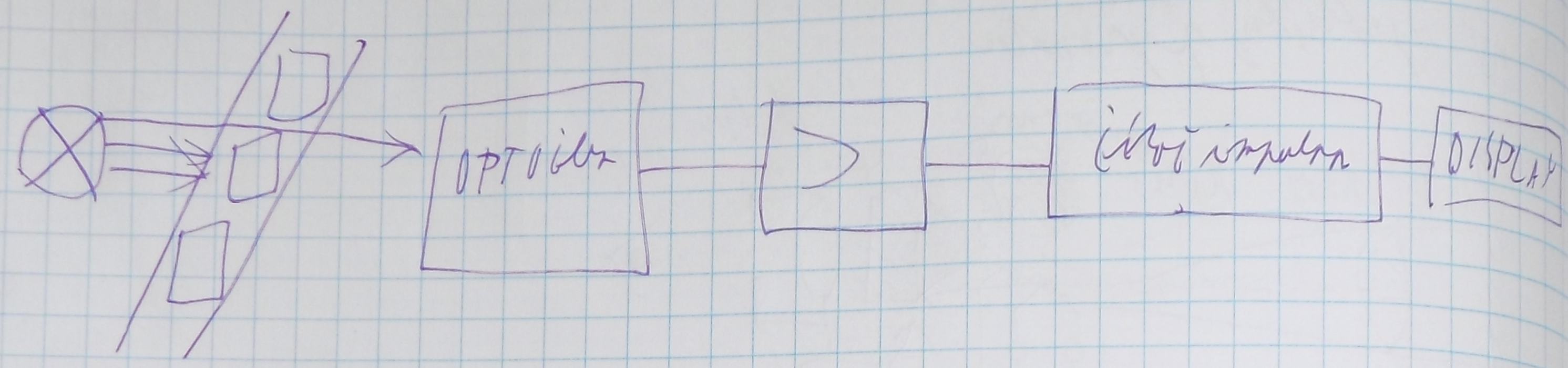 ýťahové
dvere (optická závora)
ýťahové
dvere (optická závora)
Zariadenia, ktoré merajú alebo detegujú prítomnosť objektov
Robia to pomocou vysielania a prijímania ultrazvukových vĺn
Snímač vyšle krátky ultrazvukový impulz
Impulz narazí na prekážku a časť z energie sa odrazí k prijímaču
Prijímač vypočíta vzdialenosť na základe známej rýchlosti zvuku v tomto prostredí
Deteguje objekty a meria vzdialenosť bezkontaktne
Deteguje ich bez ohľadu na farbu,ľadnosť, povrchové vlastnosti(lesklosť)
Meranie hladiny kvapalín v alebo sypkého materiálu v nádržiach
Aplikácie
detekcia polohy
počítanie? objektu
meranie rozmeru
kontrola prítomnosti v náročných podmienkach
Zdravotníctvo
Špeciálne snímače, ktoré vytvárajú statický alebo dynamický obraz
Vyšetrenie plodu
Vyšetrenie srdca – echokardiografia
Pena alebo nekonzistentné povrchy
Nedá sa na nich dobre použiť
Prostredia
Rýchlosť zvuku v prostredí treba vedieť
|
Indukčné |
Ultrazvukové |
Princíp |
Elektromagnetická indukcia – zmena magnetického poľa |
Odraz ultrazvukových vĺn od povrchu objektu |
Detekované materiály |
Len kovové predmety |
Všetky typy materiálu(kov, plast, drevo, sklo, kvapaliny) |
Merací dosah |
Krátky – zvyčajne 1 až 30 mm |
Veľký – až niekoľko metrov |
Presnosť |
Veľmi vysoká pri blízkej vzdialenosti |
Dobrá - závisí od tvaru a veľkosti objektu |
Citlivosť na prostredie |
Neovplyvňuje ju prach, voda ani farba povrchu |
Ovplyvňuje je teplota, vlhkosť, vietor, tvar a materiál objektu |
Výstupný signál |
Digitálny(spínací), alebo analógový |
Digitálny alebo analógový |
Použitie |
Meranie polohy, rýchlosti, detekcia kovových predmetov |
Meranie vzdialenosti, hladiny, prítomnosť predmetov |
Výhody |
Odolnosť, presnosť, dlhá životnosť |
Väčší dosah, univerzálnosť použitia |
Nevýhody |
Len kovy, krátky dosah |
Citlivosť na prostredie, pomalšia odozva |
súčasť meracieho člena
mení jednu veličinu na inú – najčastejšie elektrickú
umiestňuje sa medzi dve zariadenia na nadviazanie komunikácie
delenie:
prevodníky neelektrických veličín
prevodníky elektrickej veličiny
analógovo číslicové – A/Č, A/D
číslicovo analógové – Č/A, D/A
medzisystémové veličiny
elektrohydraulické
elektropneumatické
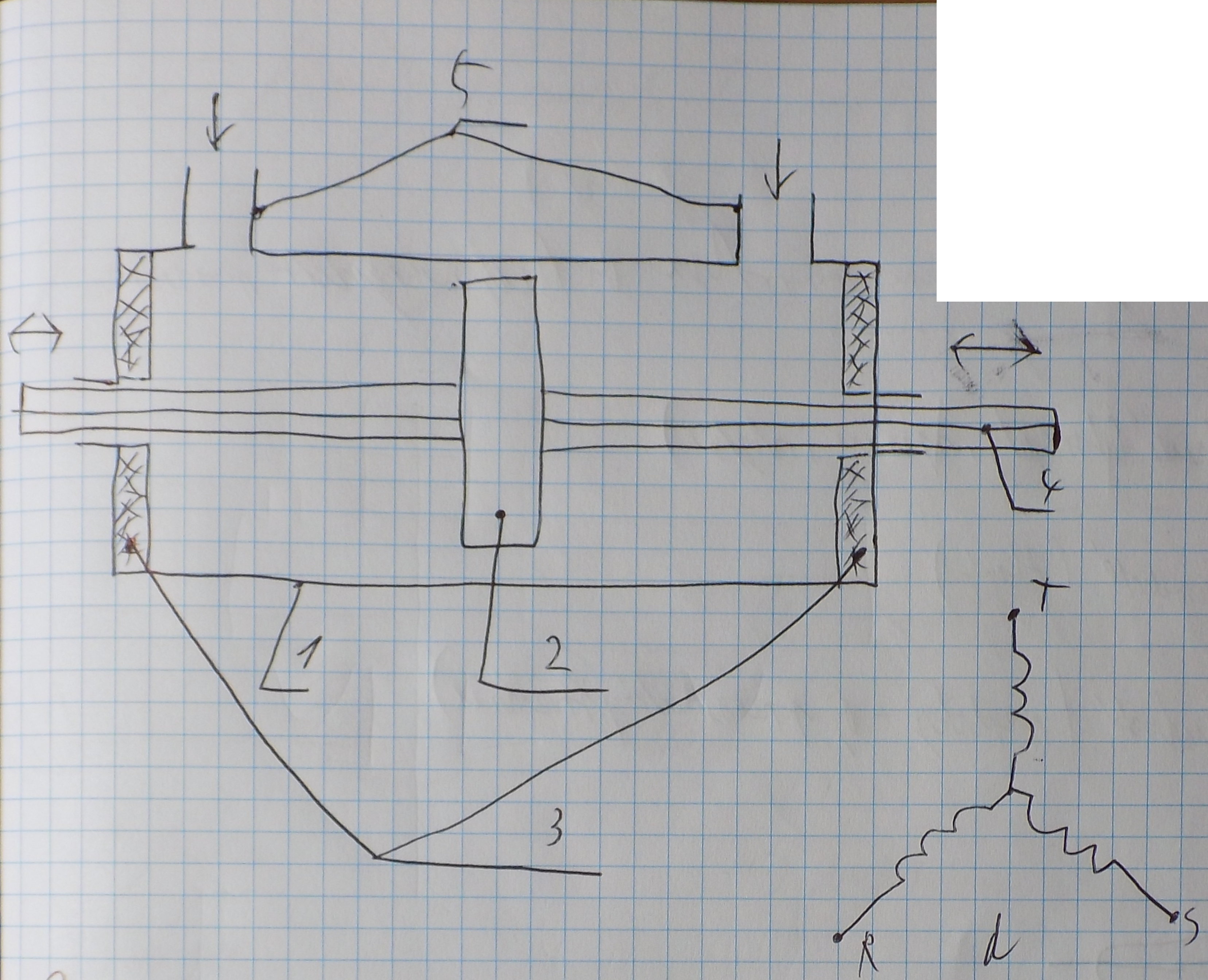
1 – cievka
2 – permanentný magnet
3 – magnetický obvod
4 – ladička
5 – dýza
6 – vlnovec
7 – nulovacia pružina
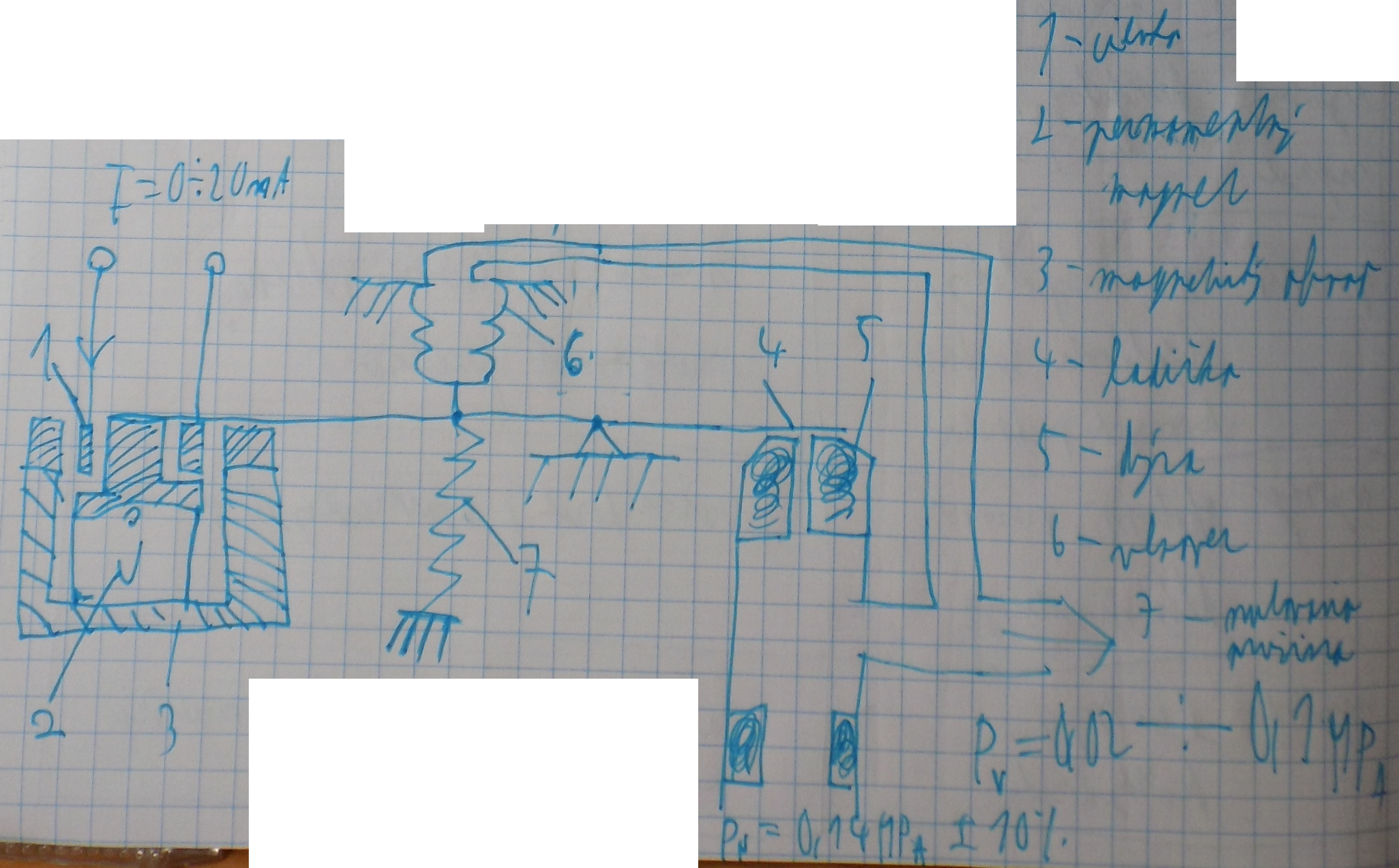
vlnovec slúži na spätnú väzbu a linearizuje pohyb páky
meria spojitý signál na nespojitý elektrický signál
podľa prevodu – priame / nepriame
podľa princípu práce – so spätnou väzbou / bez spätnej väzby
podľa činnosti prevodu:
s pílovitým priebehom napätia
s postupnou aproximáciou (s postupným priblížením)
s premenlivou frekvenciou elektrického kmitočtu
s dvojnásnobne pílovým priebehom (dual – slope)
sledovací prevodník
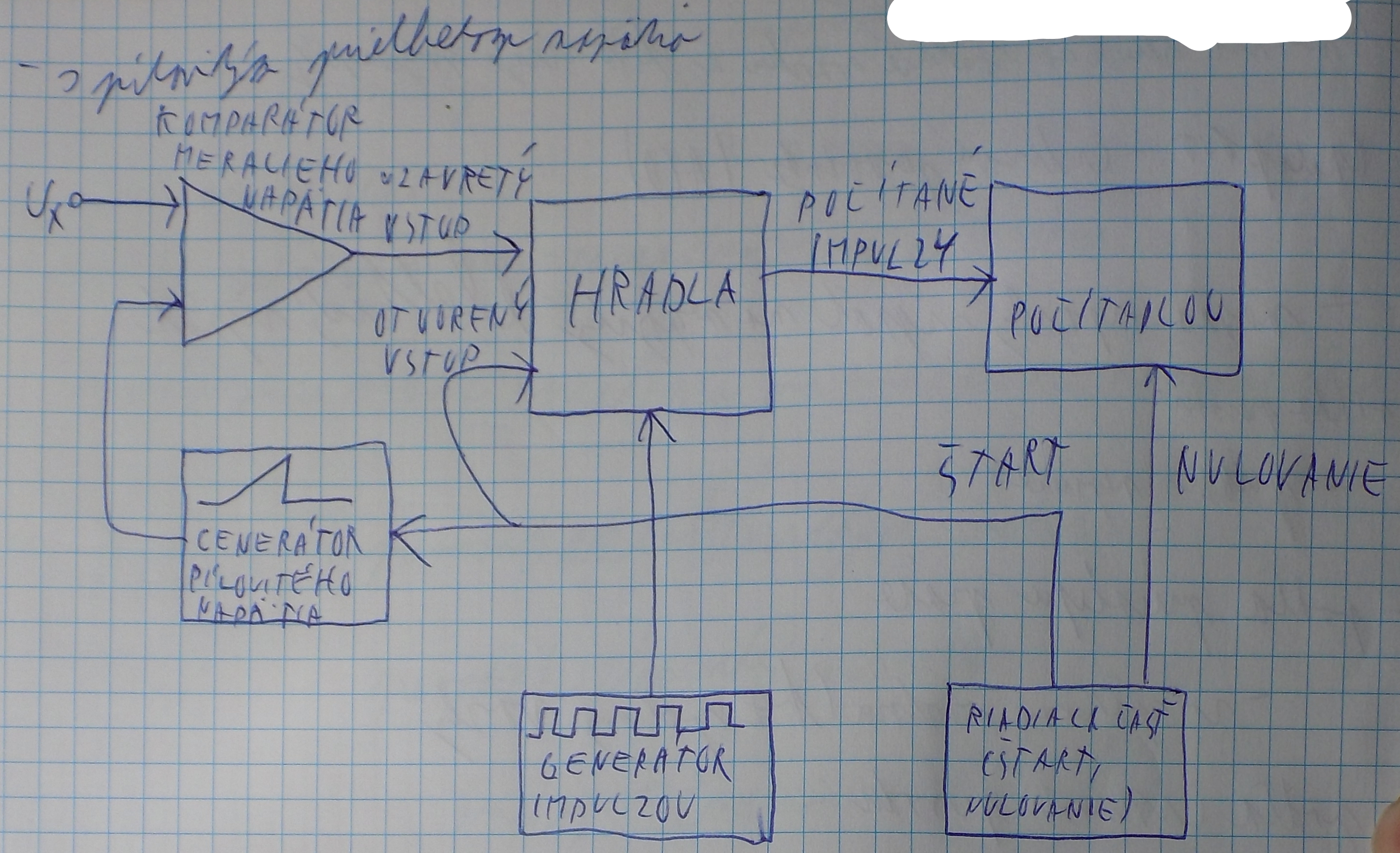 pílovitým priebehom napätia
pílovitým priebehom napätia
digitálny(číslicový) signál na analógový
všetky D/A prevodníky majú rovnakú logickú štruktúru
líšia sa len v dekódovacom obvode
delenie podľa spôsobu prevodu:
štruktúra:
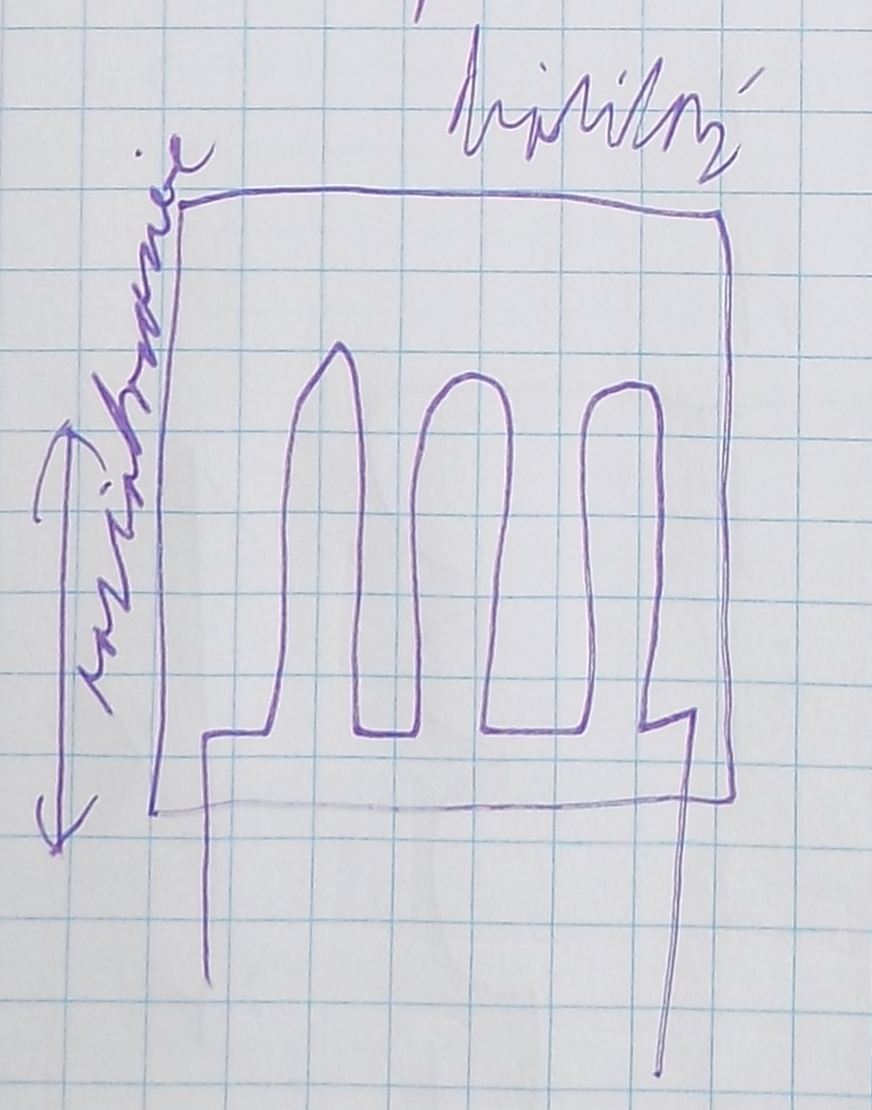
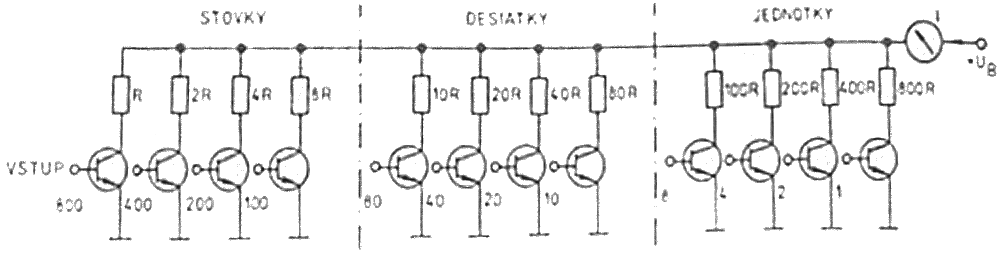
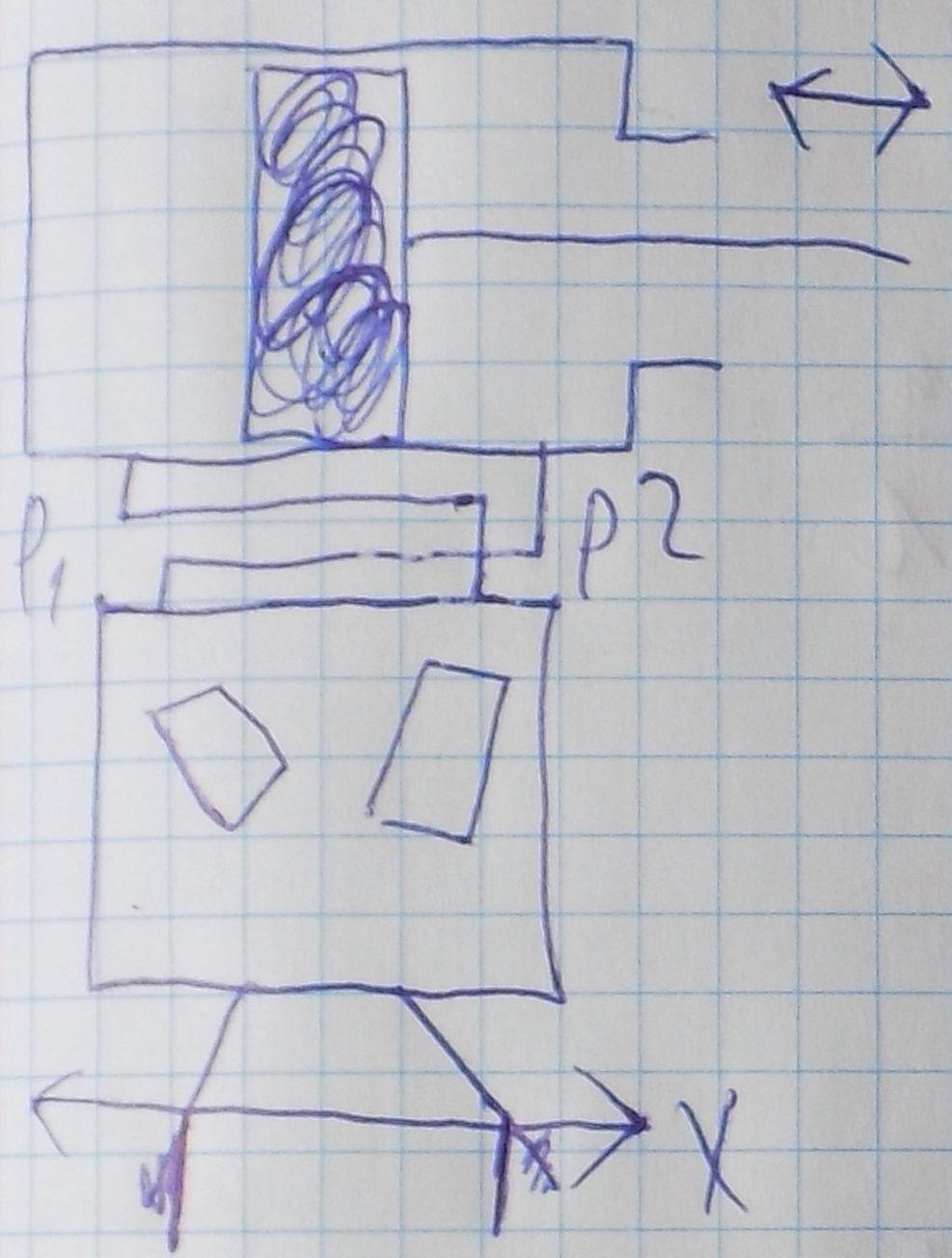
prevodníky s váhovou štruktúrou odporovej siete
1 – 15
j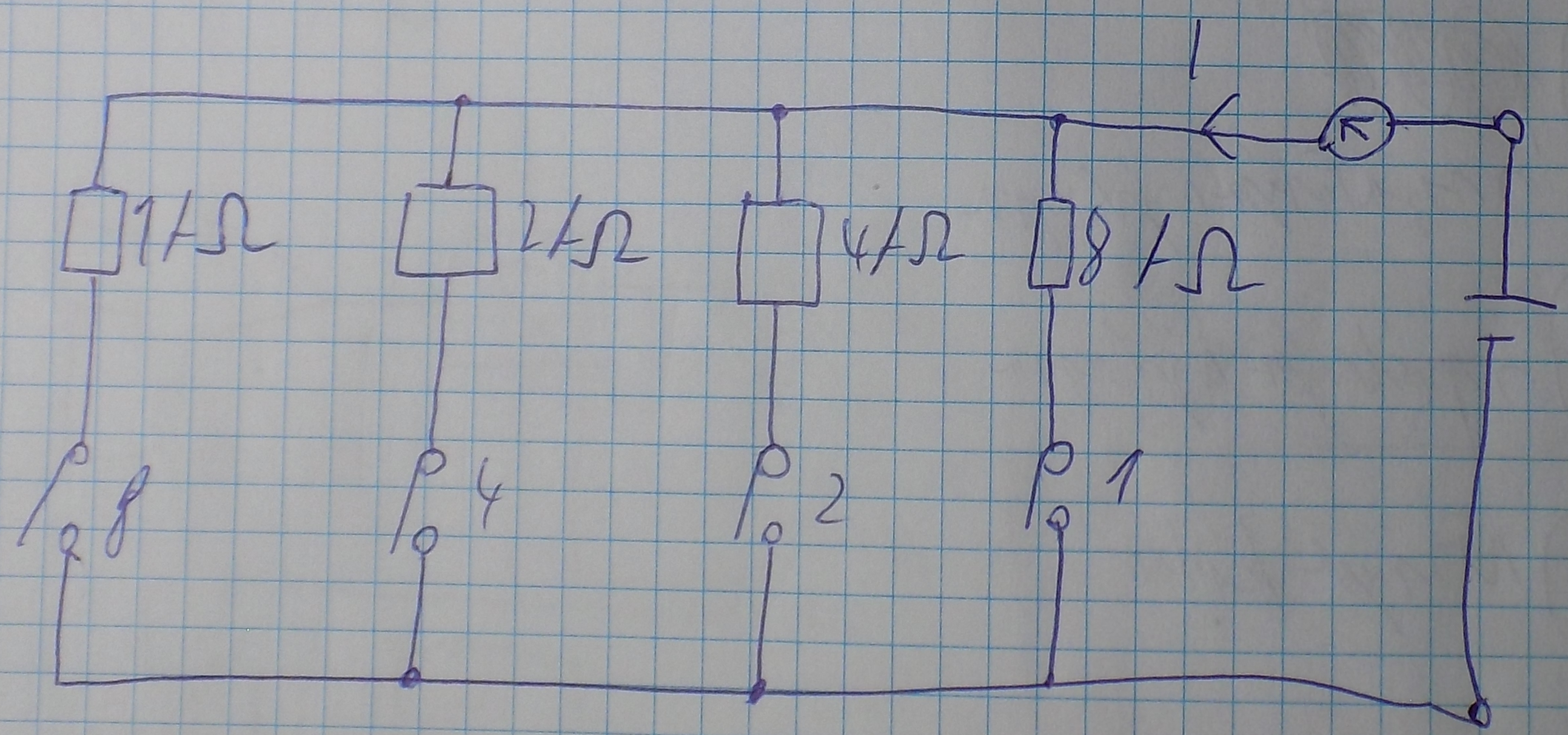 ednotky,
desiatky, stovky
ednotky,
desiatky, stovky
prevodníky s priečkovou štruktúrou odporovej siete
v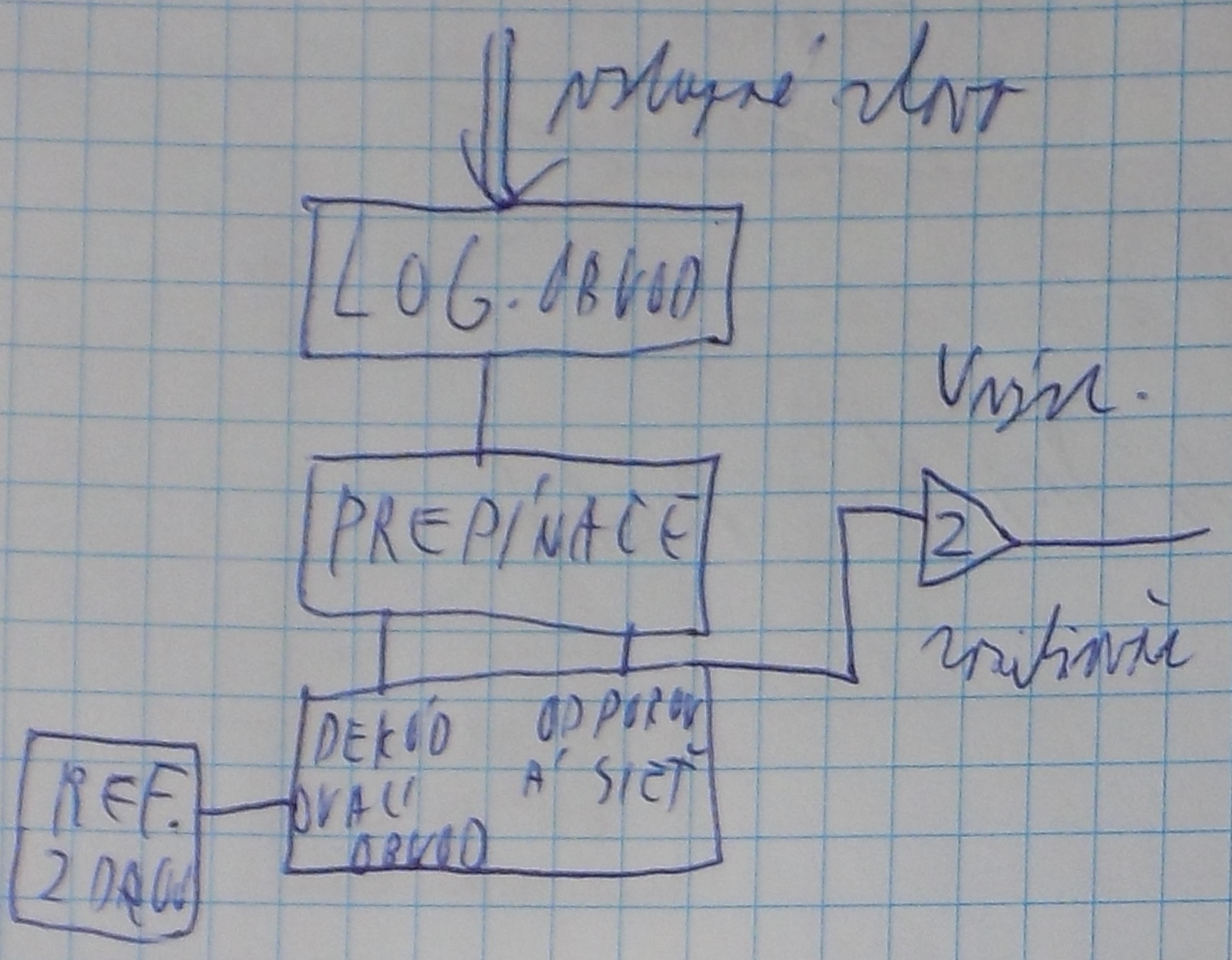 ýstup:
ýstup:
s napäťovým výstupom
s prúdovým výstupom
rôznych kódov
Logická štruktúra ----------------------------------->
používajú sa vo výbušných prostrediach
nenáročné na údržbu
znesú veľké preťaženie
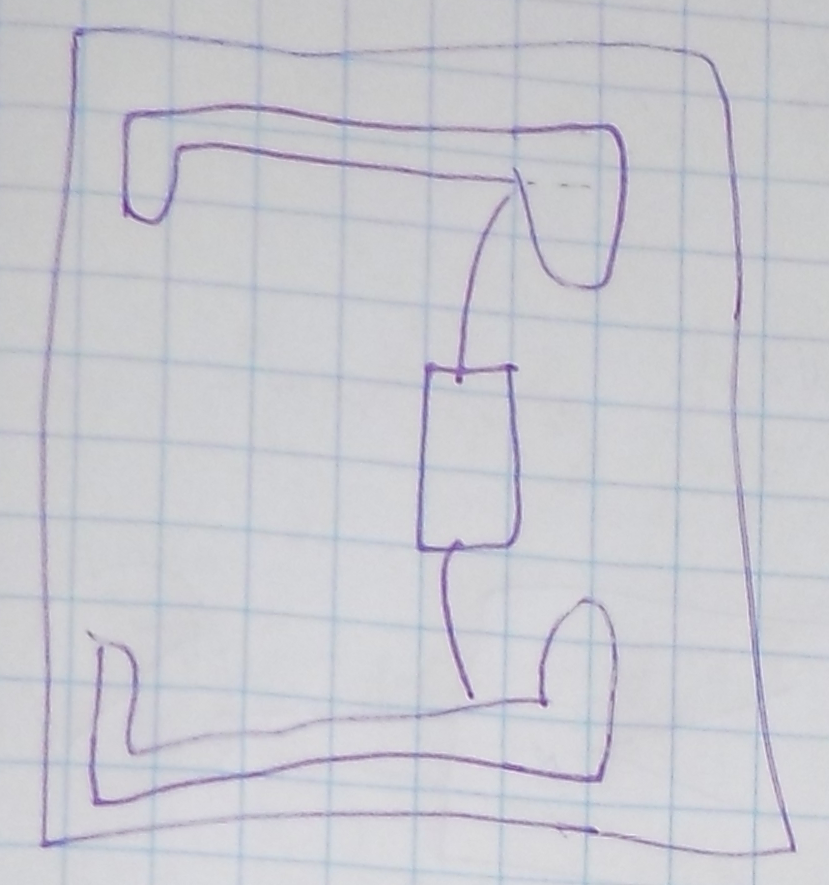
Výkyvová dýza
S dvoma dýzami
riadiacim posúvačom
Invertujúci
N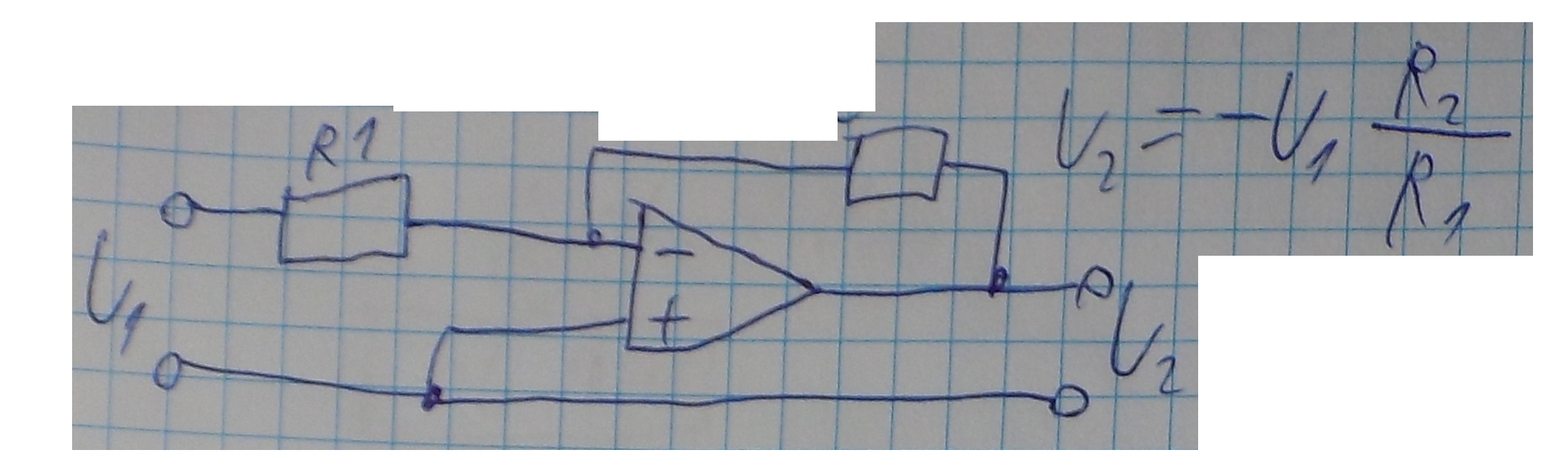 einvertujúci
einvertujúci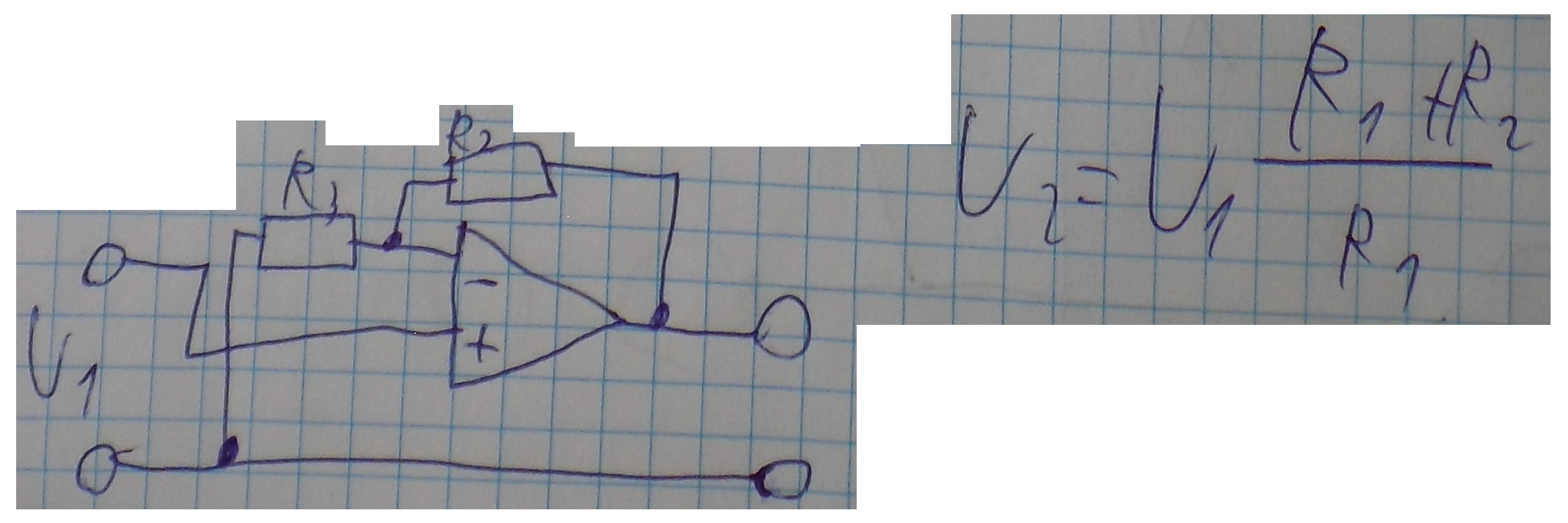
D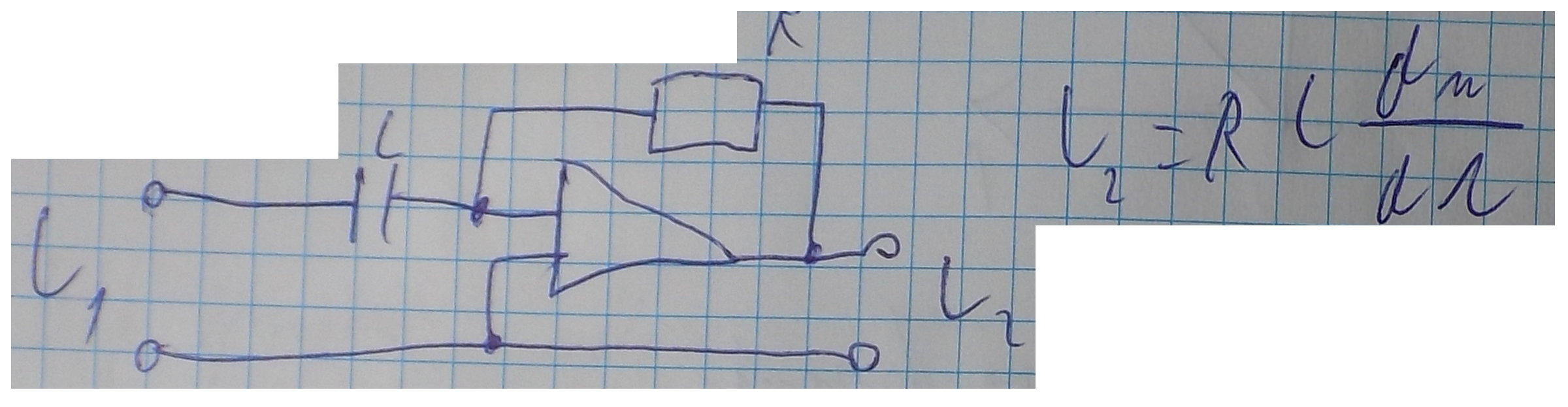 erivačný
erivačný
Diferenčný zosilňovač
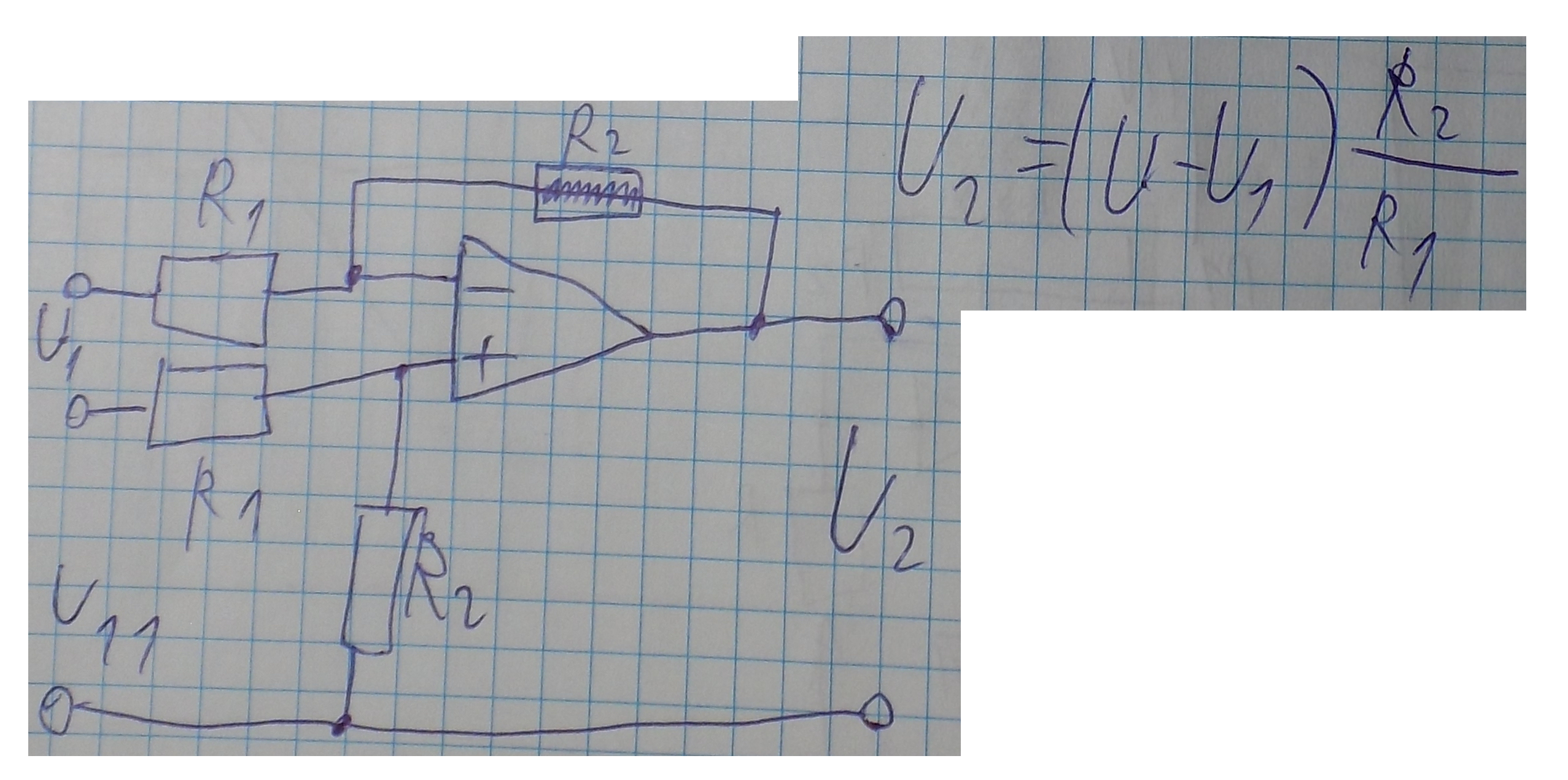 osilňovače
osilňovačeTransformujú vstupný signál na výstupný s rovnakým charakterom, ale väčšou využiteľnou energiou
Rozdelenie:
z hľadiska priebehu signálu v čase spojité / nespojité
funkcie v obvode:
operačné
výkonové
oddeľovacie
podľa fyzikálnej veličiny:
pneumatické
hydraulické
elektrického
podľa štatistických charakteristík:
lineárne
nelineárne
dynamických charakteristík:
NF
VF
Širokopásmové
Využívajú sa vo výbušnom prostredí
Nenáročné na údržbu
Znesú veľké preťaženie
Relatívne malé rozmery
Potrebujú externý zdroj vzduchu (kompresor)
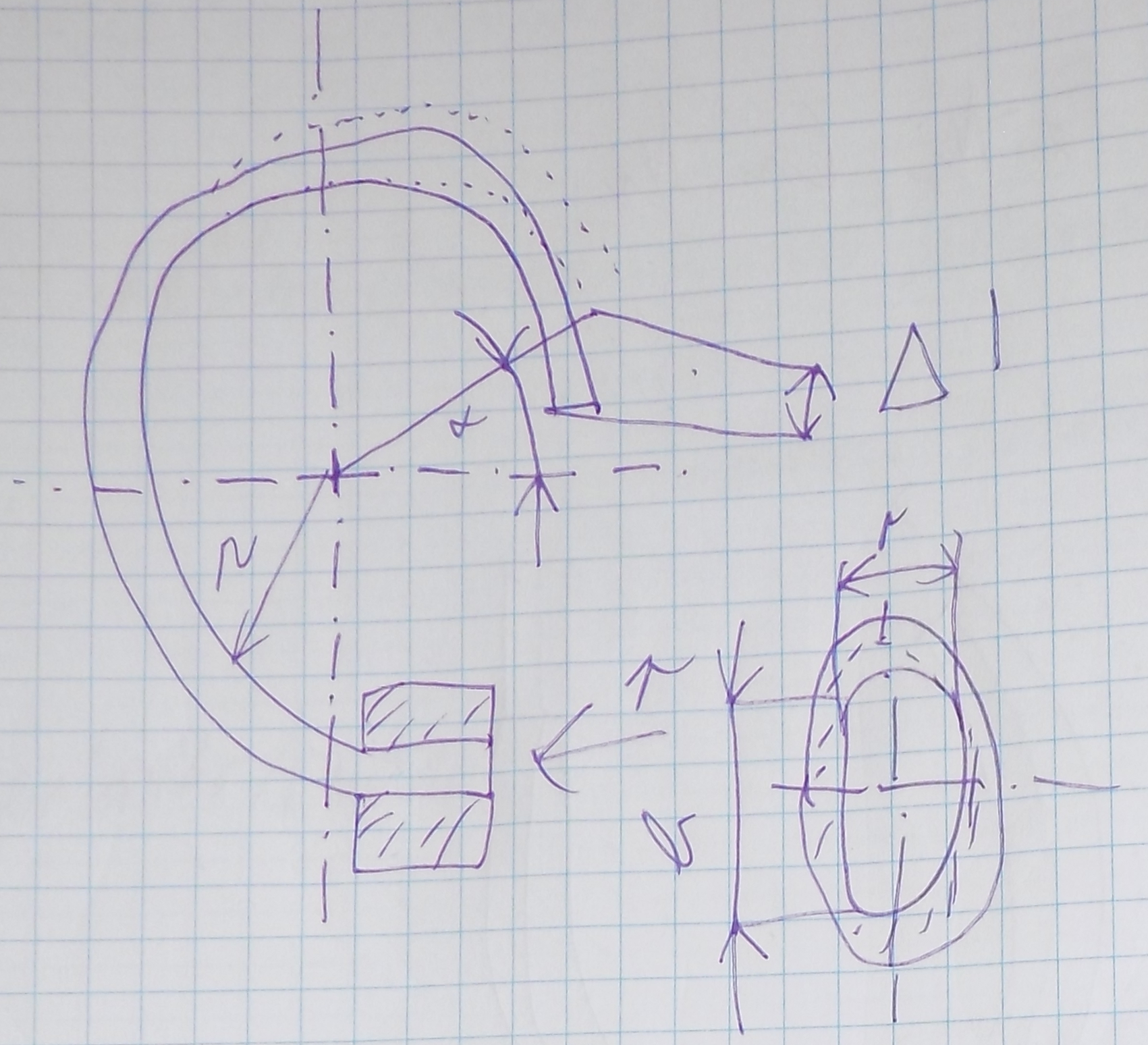
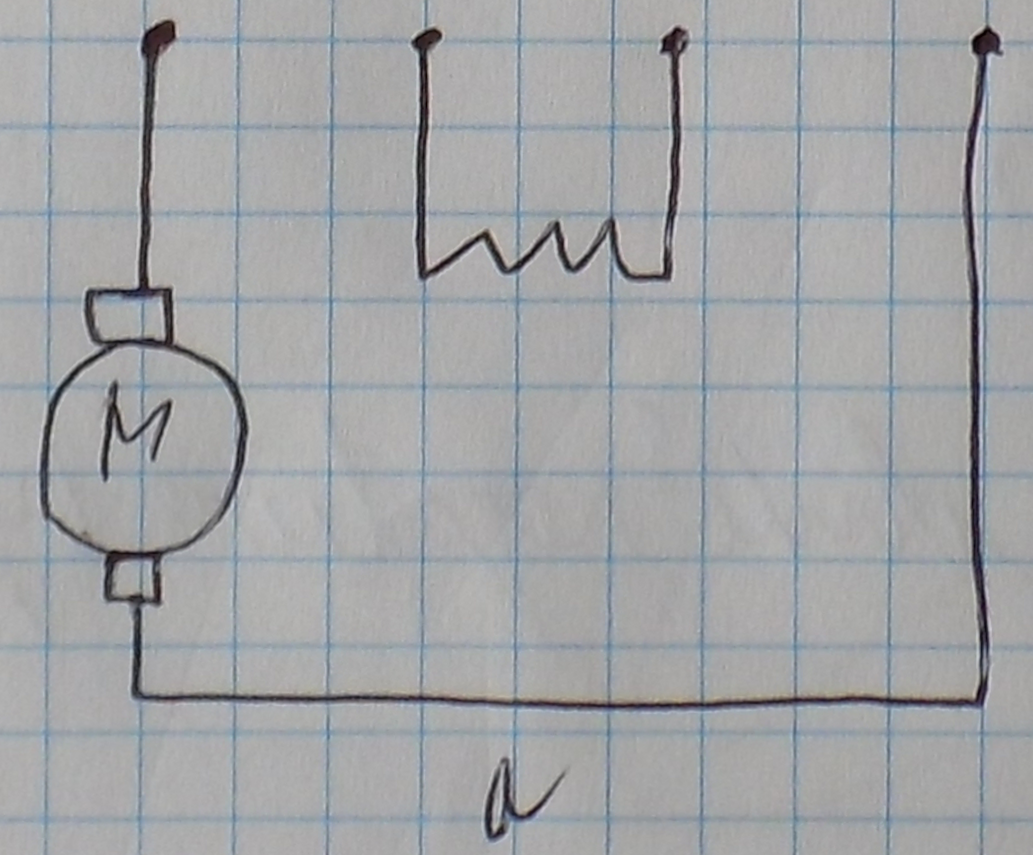
Vykonáva zásah do regulačnej sústavy
P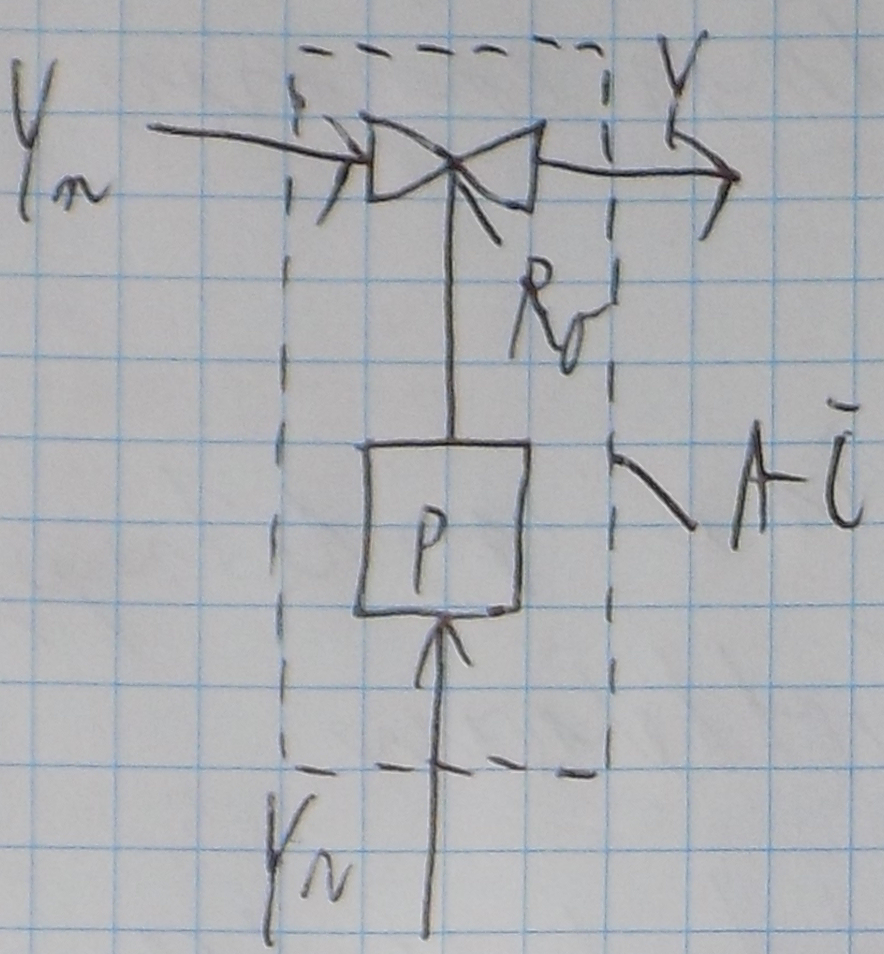 – pohon
– pohon
RO – regulačný orgán
Yn – vstup látok a energie
Yr – opravná veličina
Y – akčná veličina
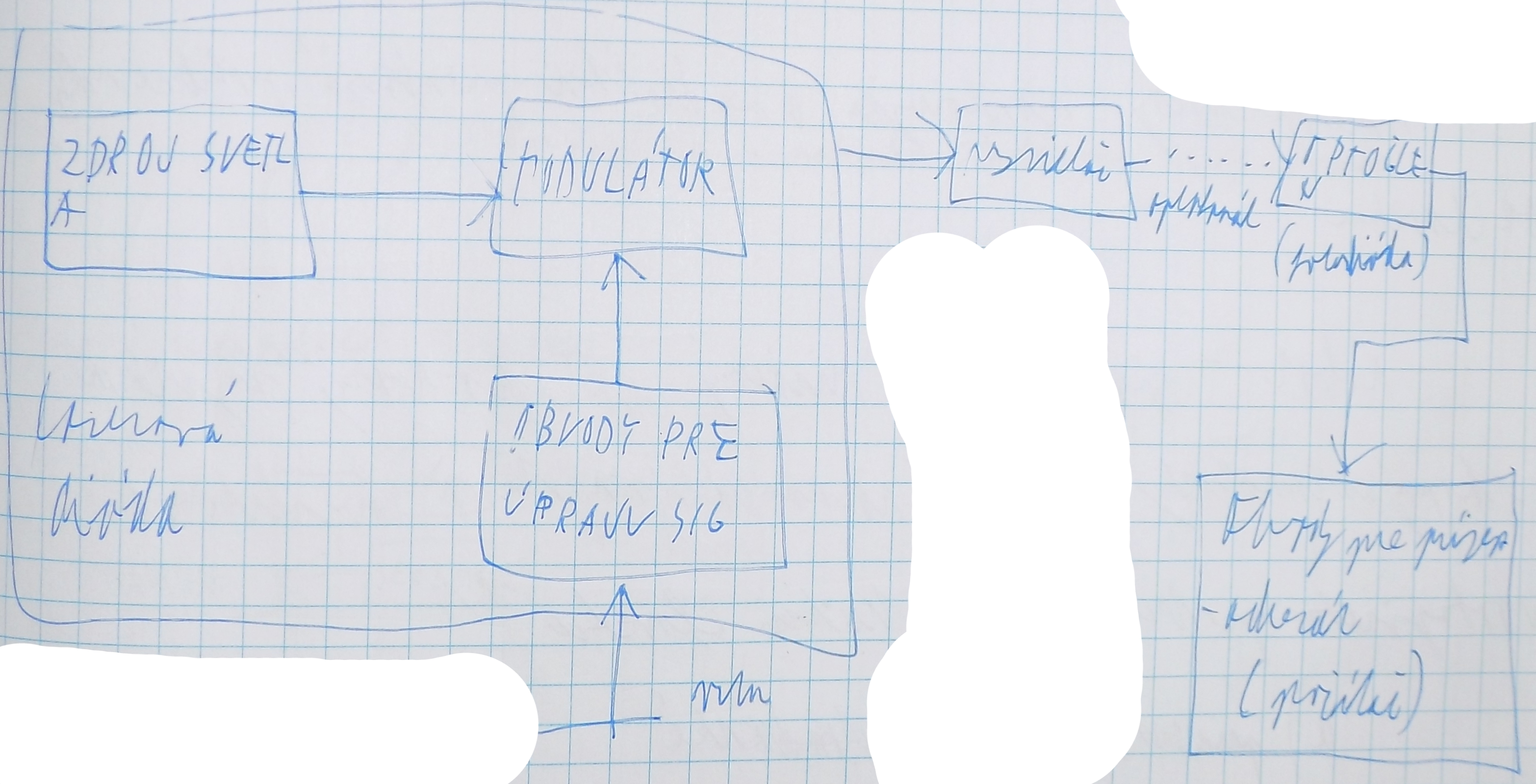
Zariadenie, ktoré mení vstupný signál (tlak, napätie) na výstupný signál (prácu, výkon)
Podľa princípu:
mechanické
pneumatické
hydraulické
elektrické
elektricko – hydraulické
elektricko – pneumatické
stavebnicové konštrukcie
Používajú sa vo výbušnom prostredí
nenáročné na údržbu
znesú veľké preťaženie
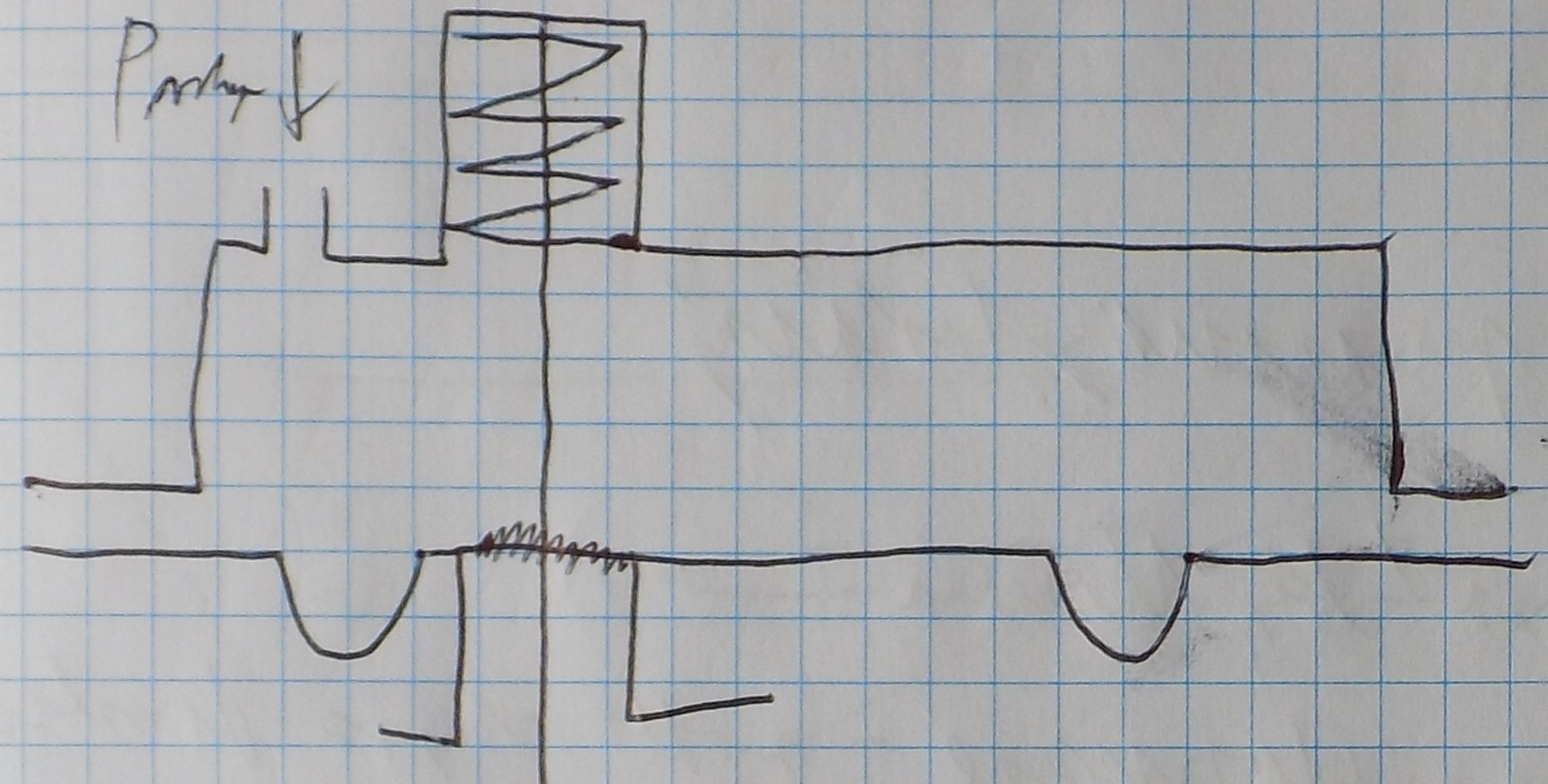
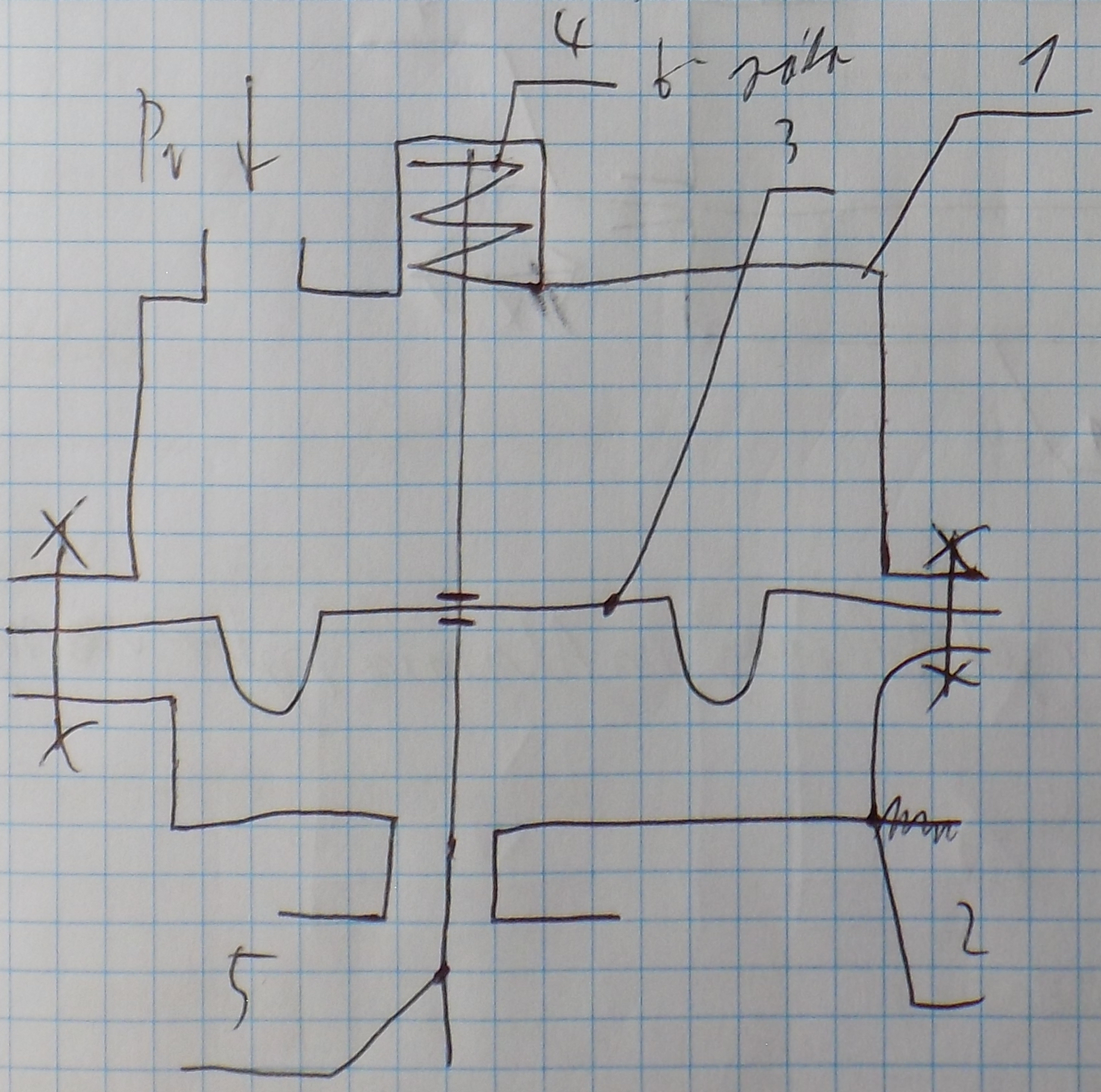
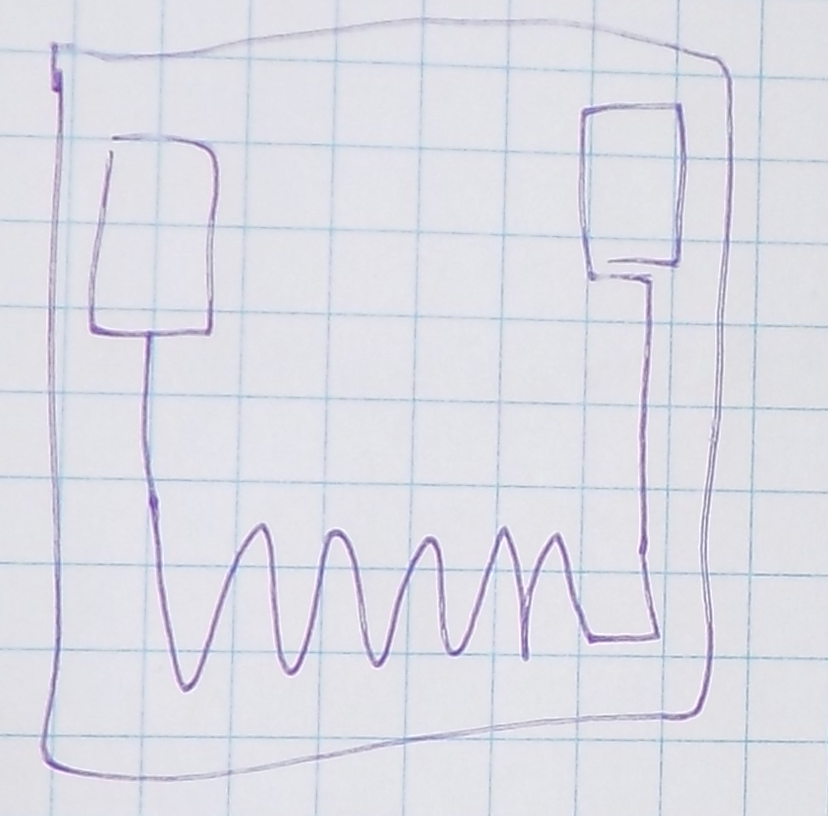
Pv – vstupný tlak
1 – vstupná komora
2 – spodná komora
3 – gumotextilná? ???
4 – nulovacia pružina
5 – tiahlo
6 – páka
Výbušné prostredie
Nenáročné na údržbu
Znesú veľké preťaženia
Relatívne malé rozmery
Rozdelenie:
pohyb priamočiary / rotačný
s tlmením / bez tlmenia
jednočinné / dvojčinné – podľa vstupov do valca
jednostranné / obojstranné – podľa vysúvania valca
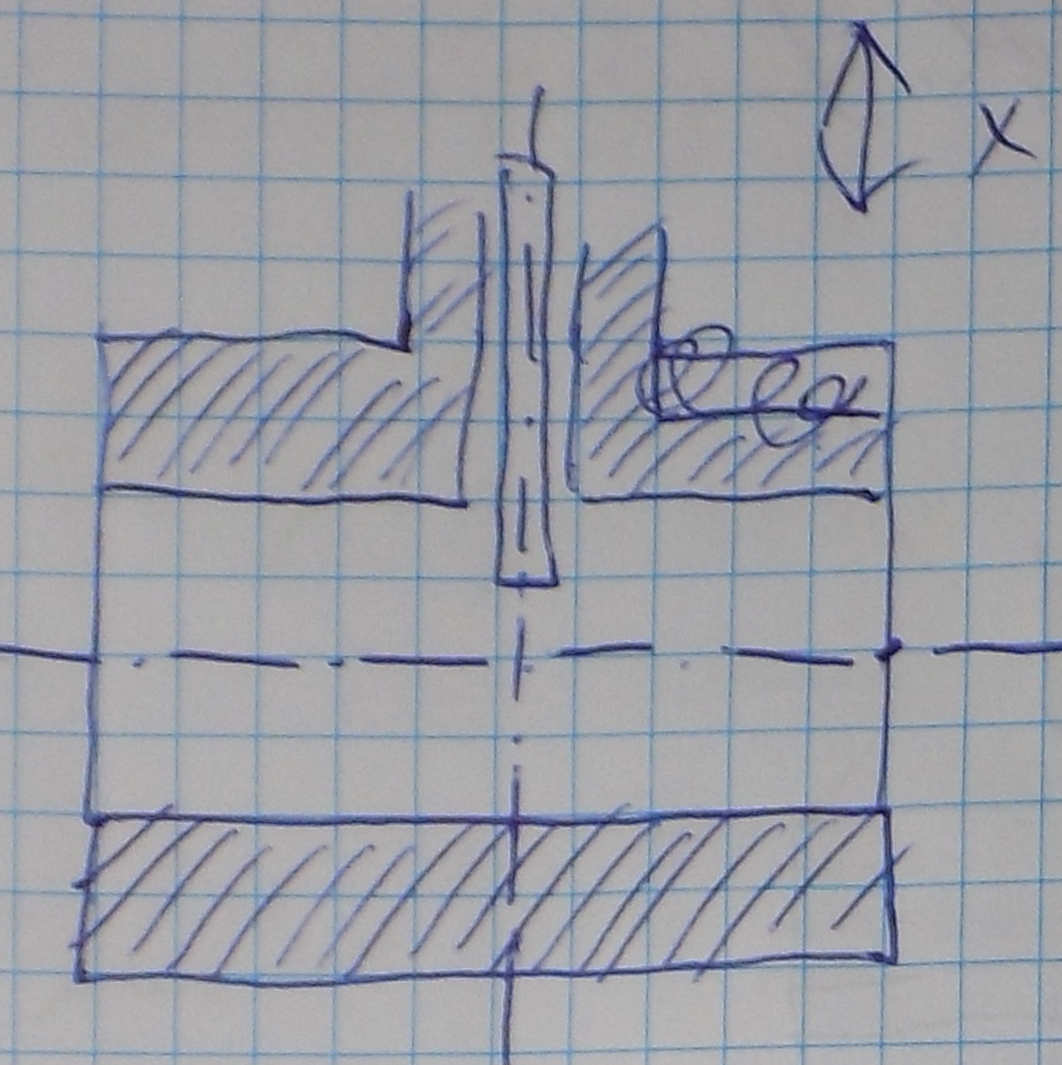
1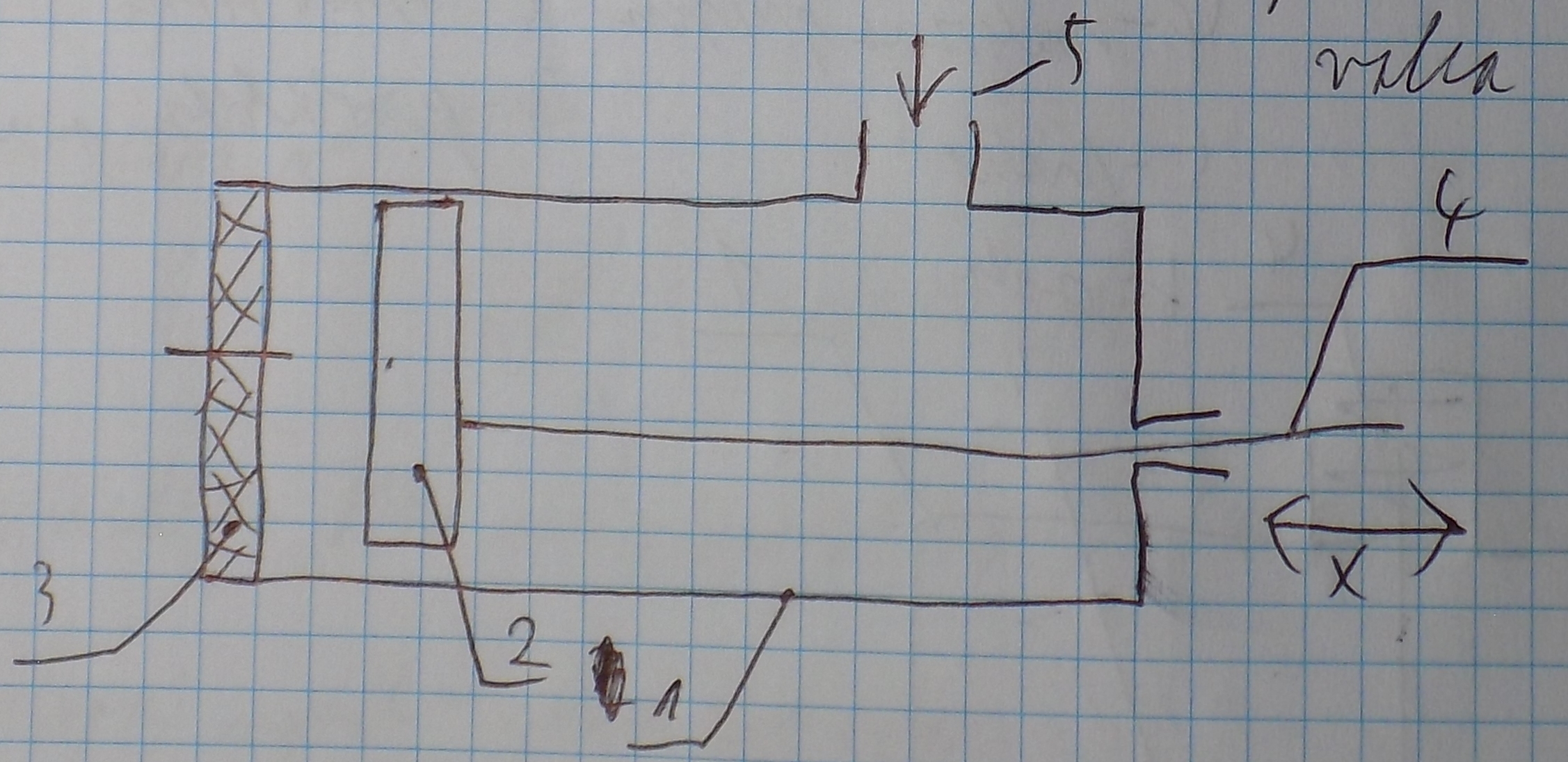 – valec
– valec
2 – piest
3 – tlmenie
4 – tiahlo
5 – vstup
priamočiary, jednostranný s tlmením, jednočinný
Najčastejšie
jednosmerné:
s cudzím budením
striedavý:
jednofázový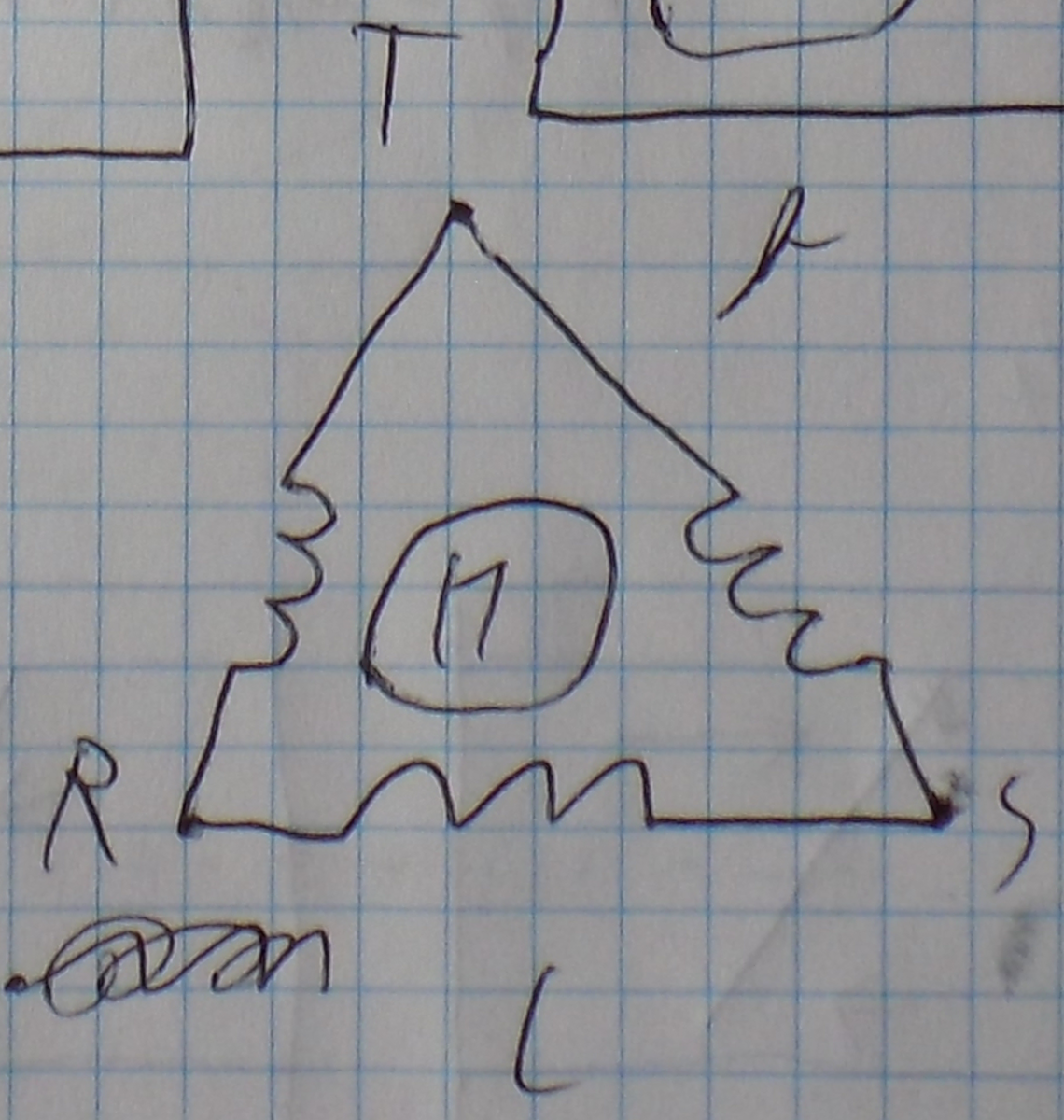
dvojfázový
trojfázový
krokový
synchrónne / asynchrónne
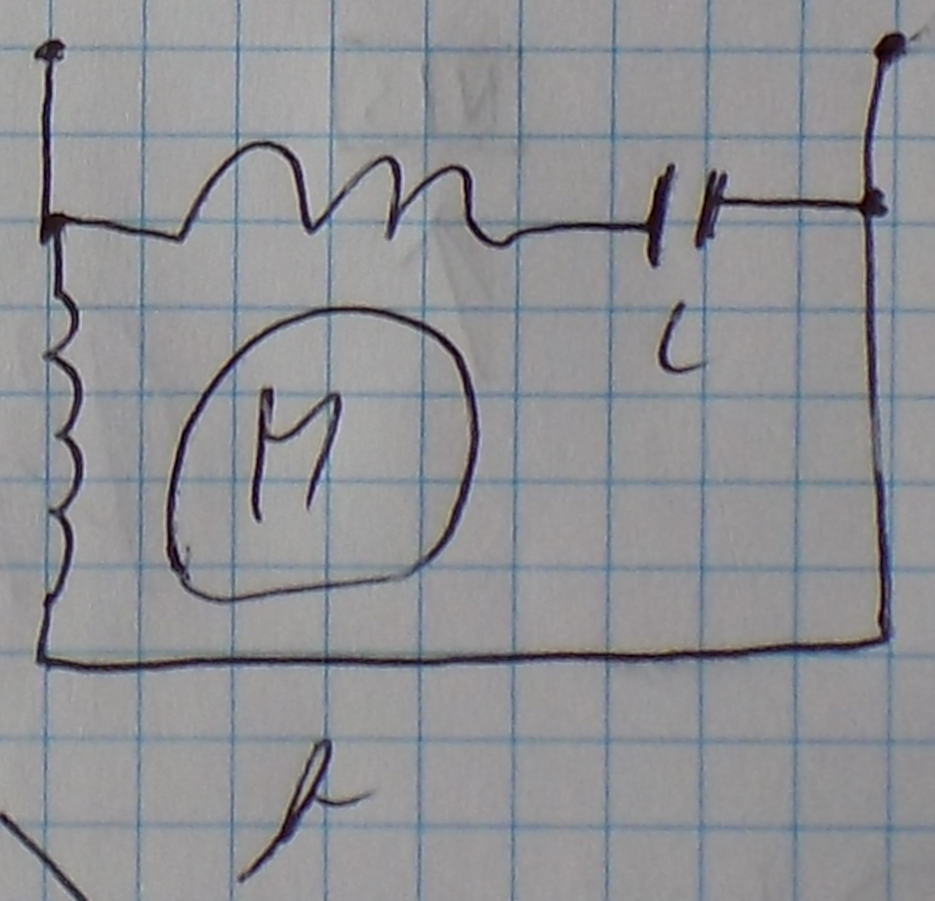
A – univerzálny motor s oddeleným vinutím
B – jednofázový asynchrónny
C – trojfázový:
do trojuholníka
do hviezdy
Zabezpečujú zmenu množstva do technologického procesu
elektrické:
spínač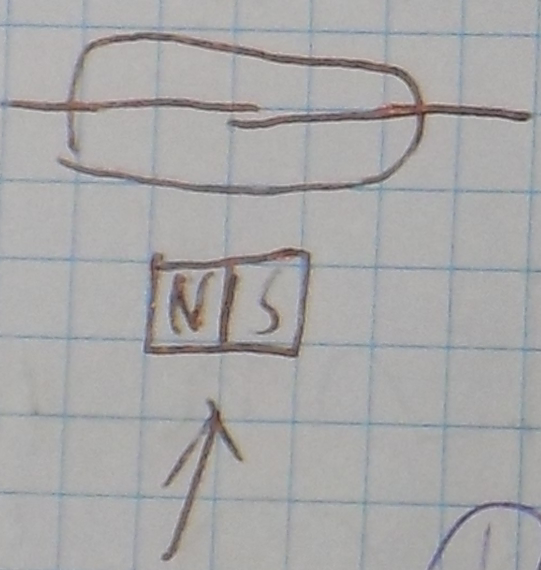
stykač
kontakt
pneumatické:
klapky
hydraulické:
ventily – aj pneumatické
posúvače
Klapka
Q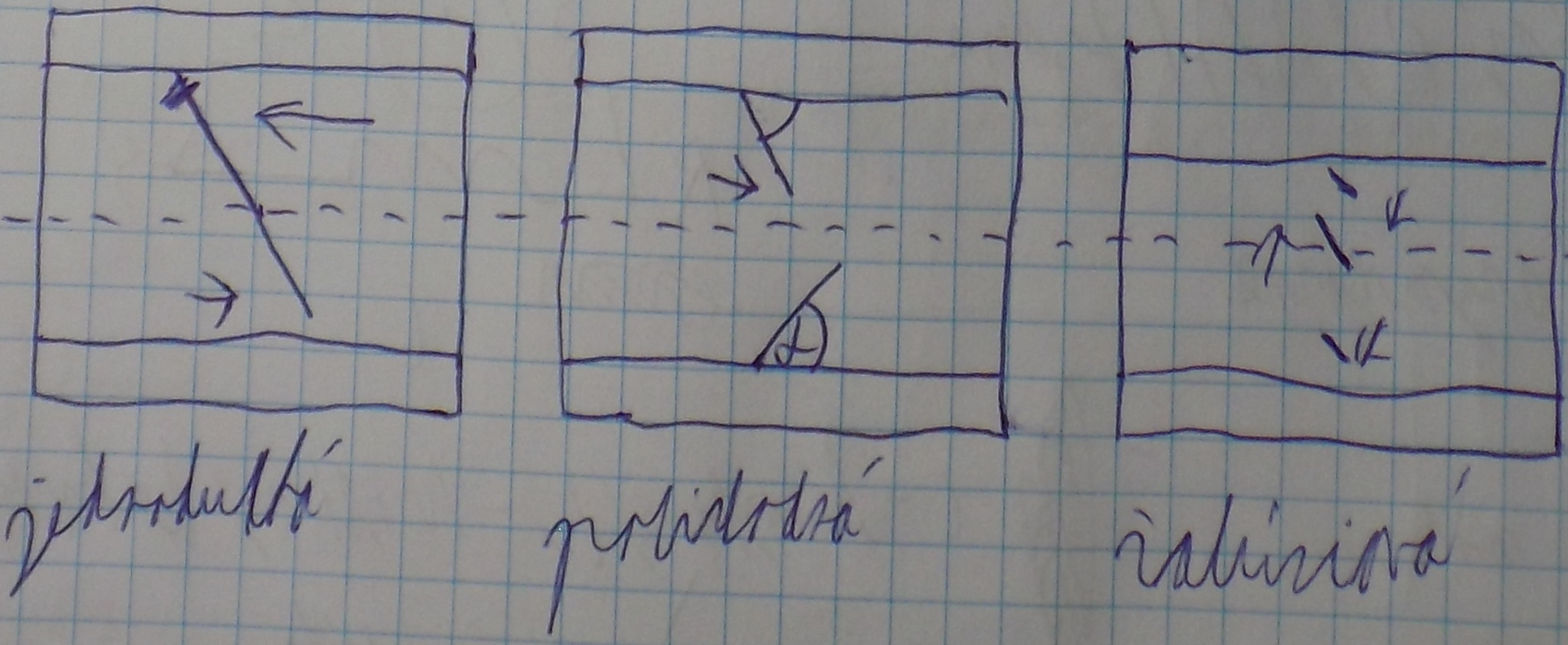 = f(α)
= f(α)
Rýchlo sa otvárajúci:
S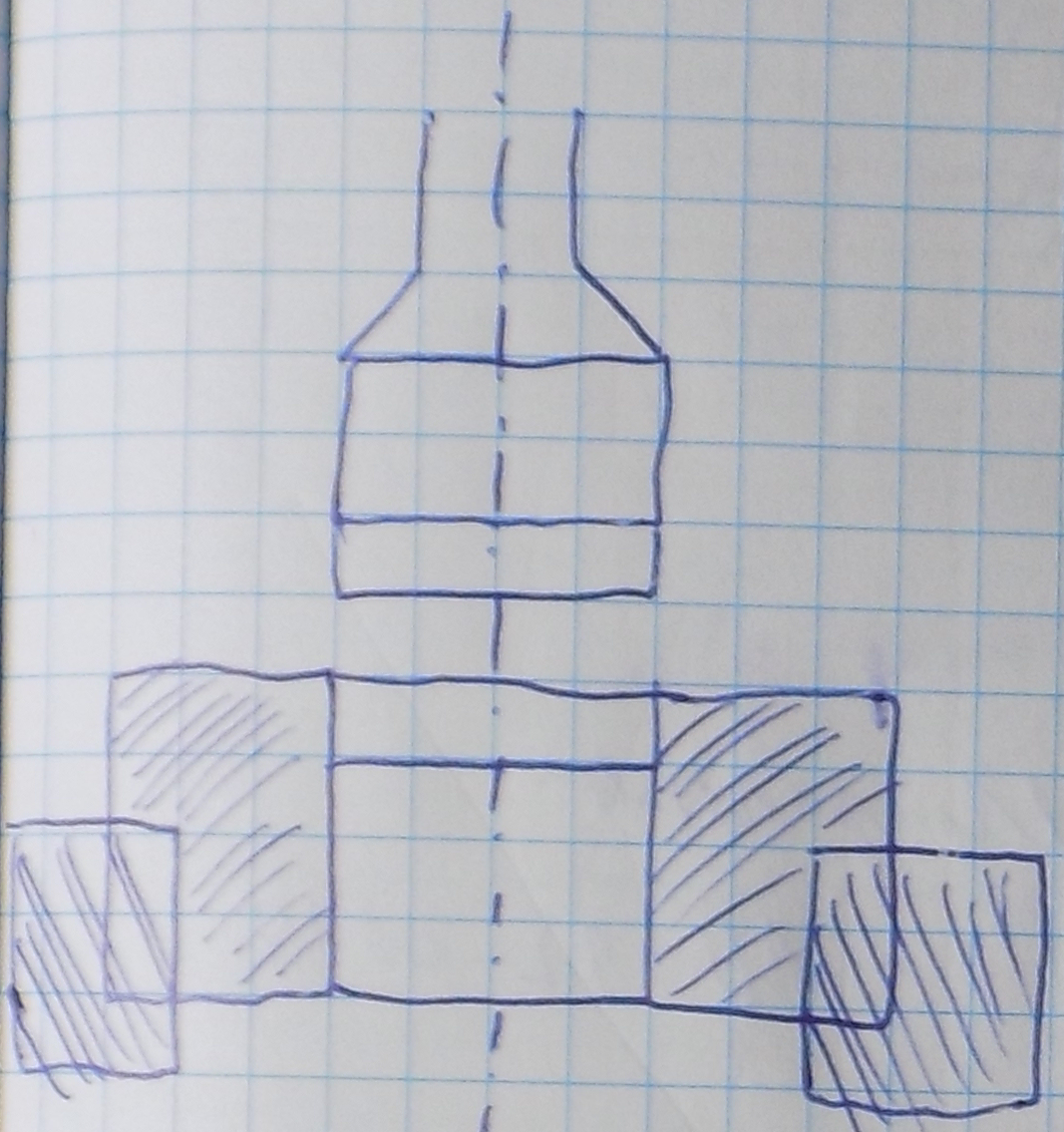 lineárnou charakteristikou:
lineárnou charakteristikou:
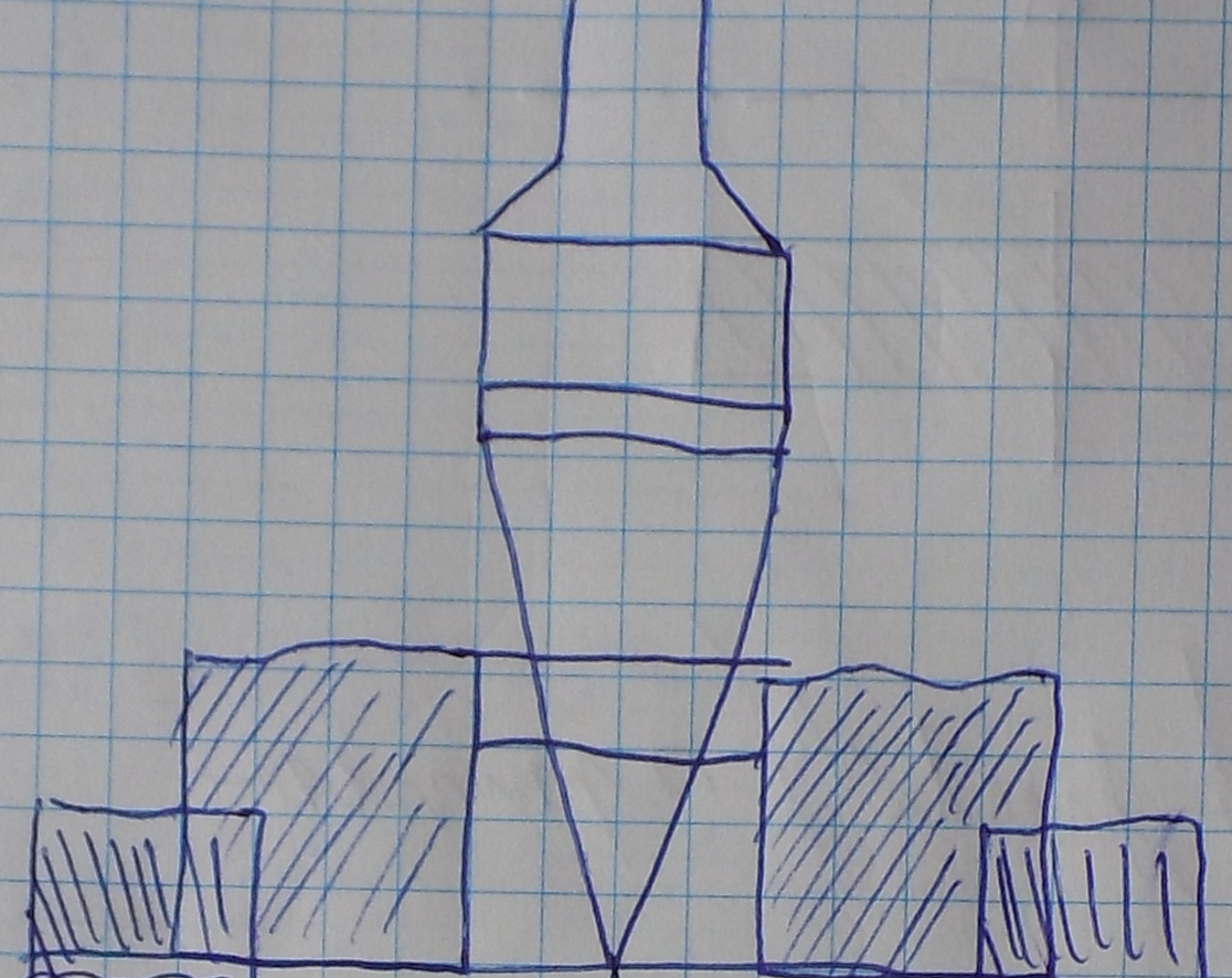
S logaritmickou charakteristikou:
S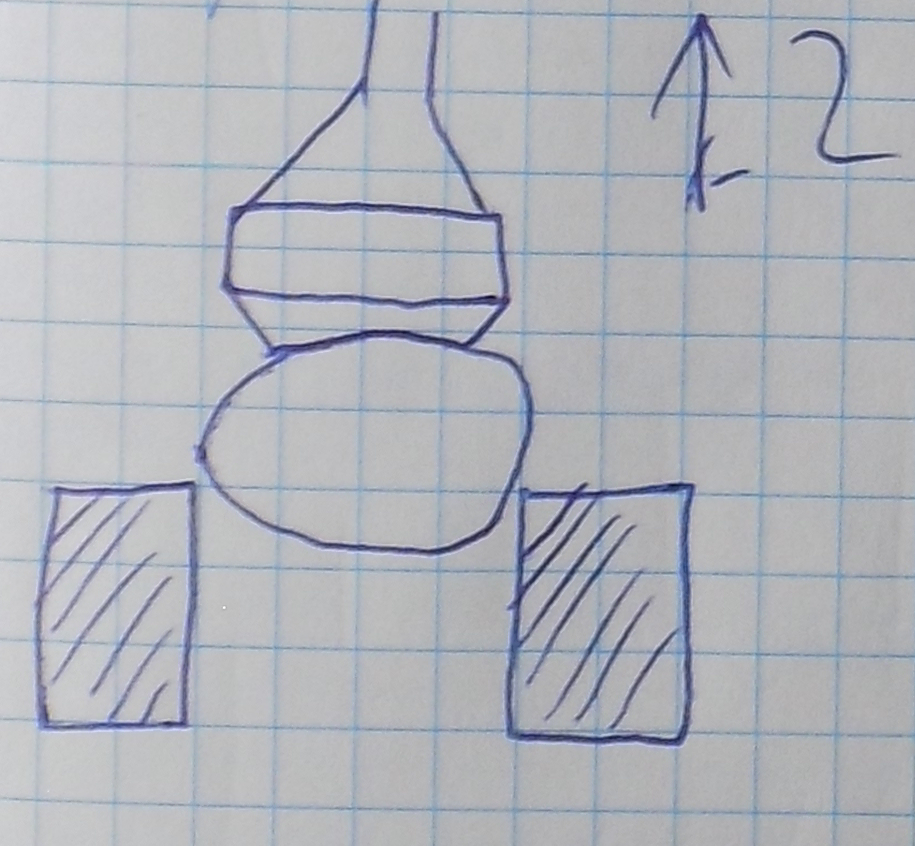 = prietoková plocha
= prietoková plocha
Q = f(Z)
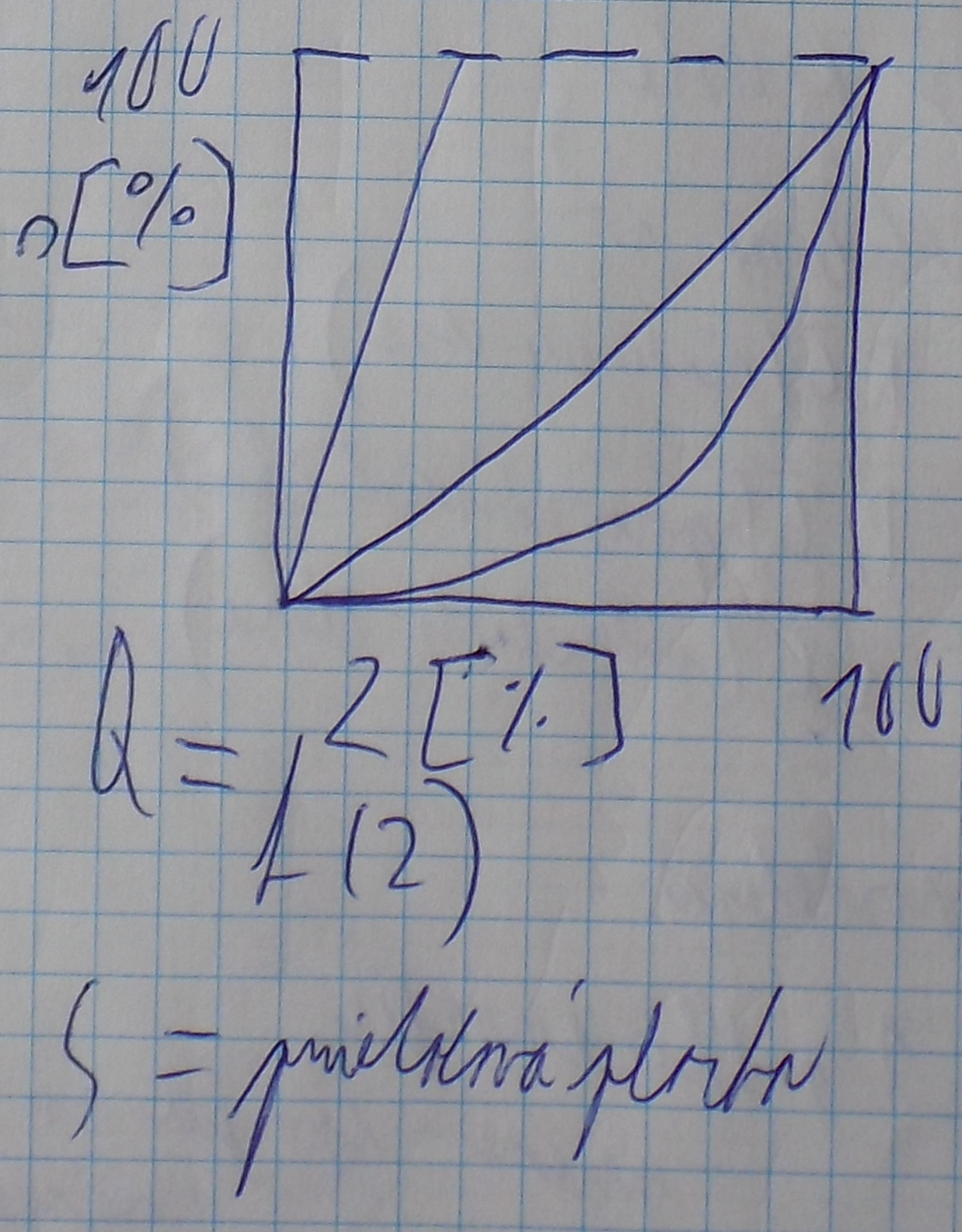
S = f(x)
hydraulický s posúvačom
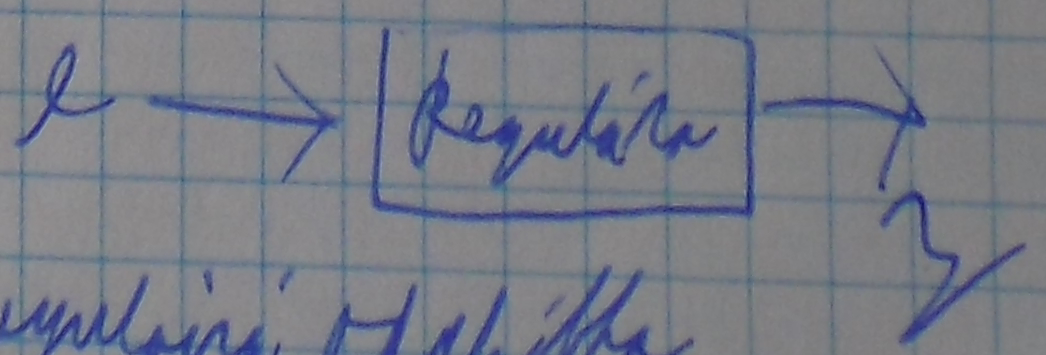
Regulátor:
zariadenie , ktoré v regulačnom obvode udržuje regulovanú veličinu na požadovanej hodnote
skladá sa z:
RČ (riadiaceho člena)
PoČ (porovnávacieho člena)
ÚČ (ústredného člena)
rozdelenie:
Podľa energie:
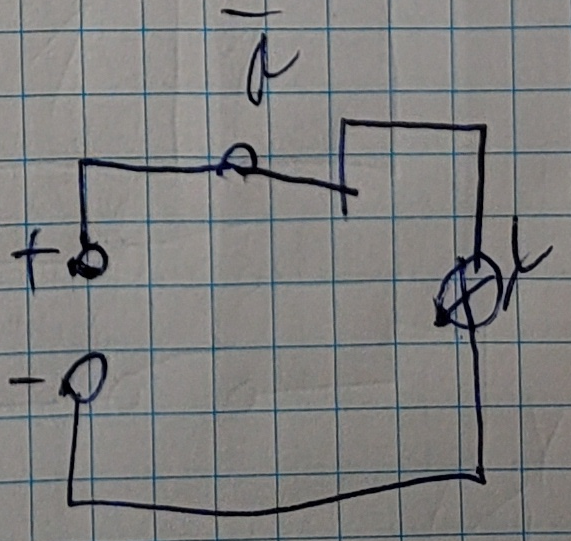
priame
energiu na svoju činnosť získavajú zo sústavy
napr – splachovacia nádrž
nepriame
energiu na svoju činnosť musíme dodať
Podľa druhu energie (konštrukčného prevedenia):
mechanické
elektrické
pneumatické
hydraulické
Podľa časovej spojitosti časového signálu
spojité (výstupný signál sa mení plynulo)
nespojité (výstupný signál sa mení skokom)
Jednoduché (základné):
P – proporcionálny
I – integračný
D – derivačný
Kombinované:
PD – proporcionálno – derivačný
PI – proporcionálno – integračný
PID – propocionálny – integračno – derivačný
spätnoväzobné
zložité stavebnicové konštrukcie
PP = (1 / K) * 100 [%]
K – zosilnenie
PP – proporcionalita regulátora
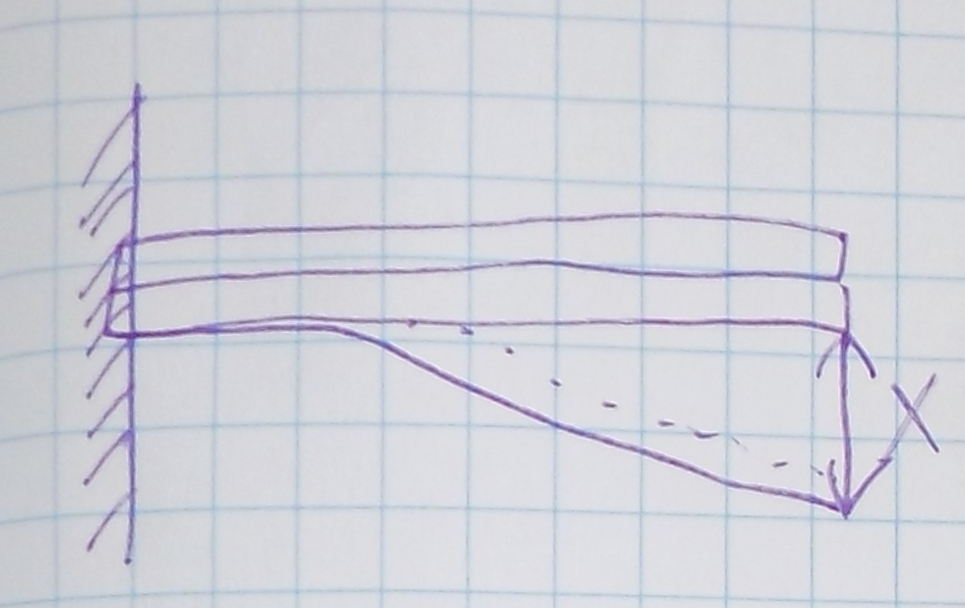
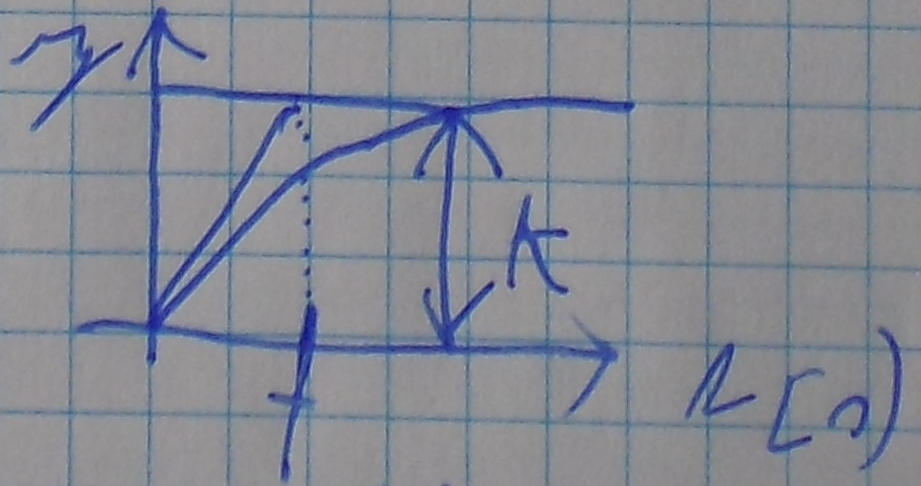
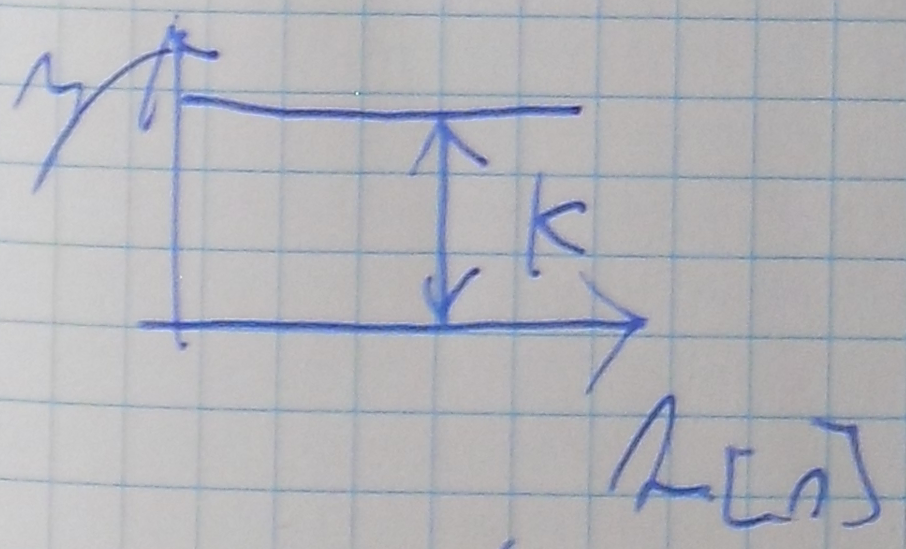
Ideálny: s oneskorením prvého rádu (reálny)
y(t) = k * (1 – e(-t/T))
![]()
y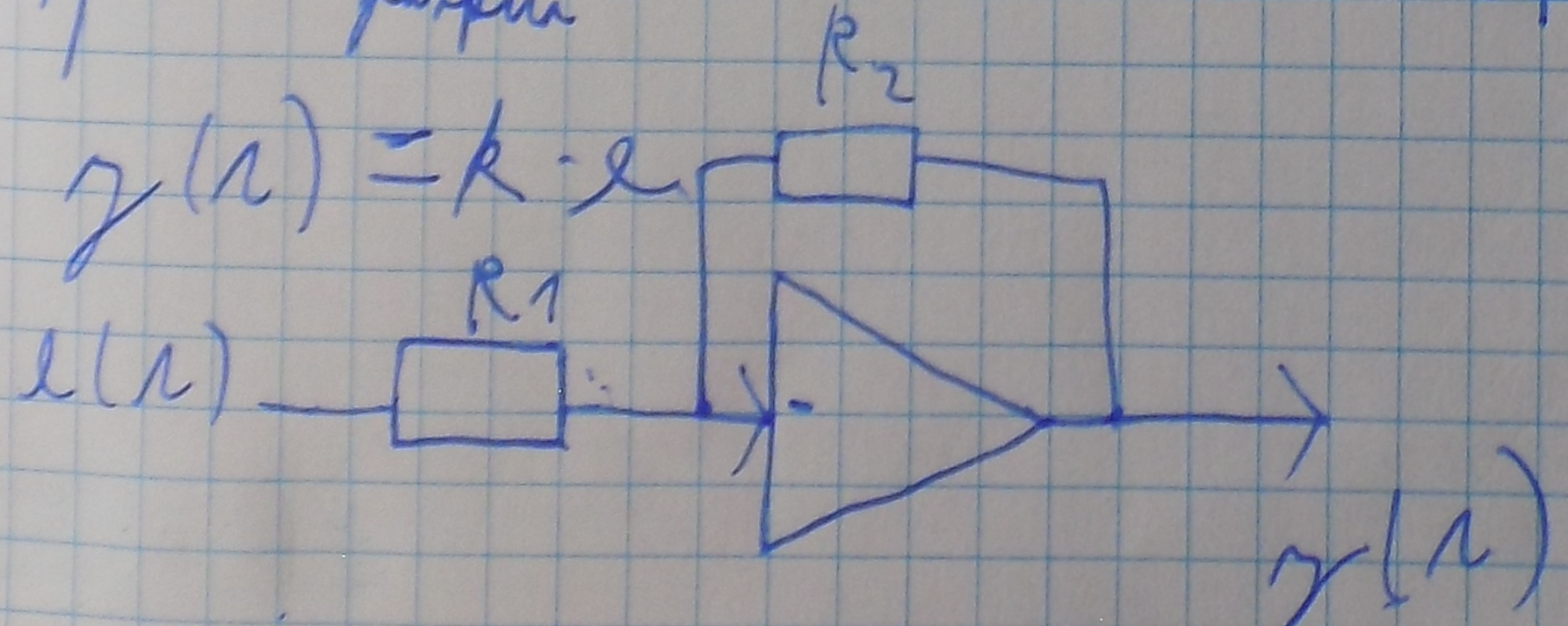 – akčná veličina
– akčná veličina
e – regulačná odchýlka
Výstupný signál (regulátor je úmerný integrálu vstupu)
používa sa na reguláciu statických sústav – tam sa vyznačuje vysokou presnosťou
keď sa použije na reguláciu astatickej sústavy, zvýši jej astatickosť o jeden rád
ideálna prechodová charakteristika
![]()
![]()
č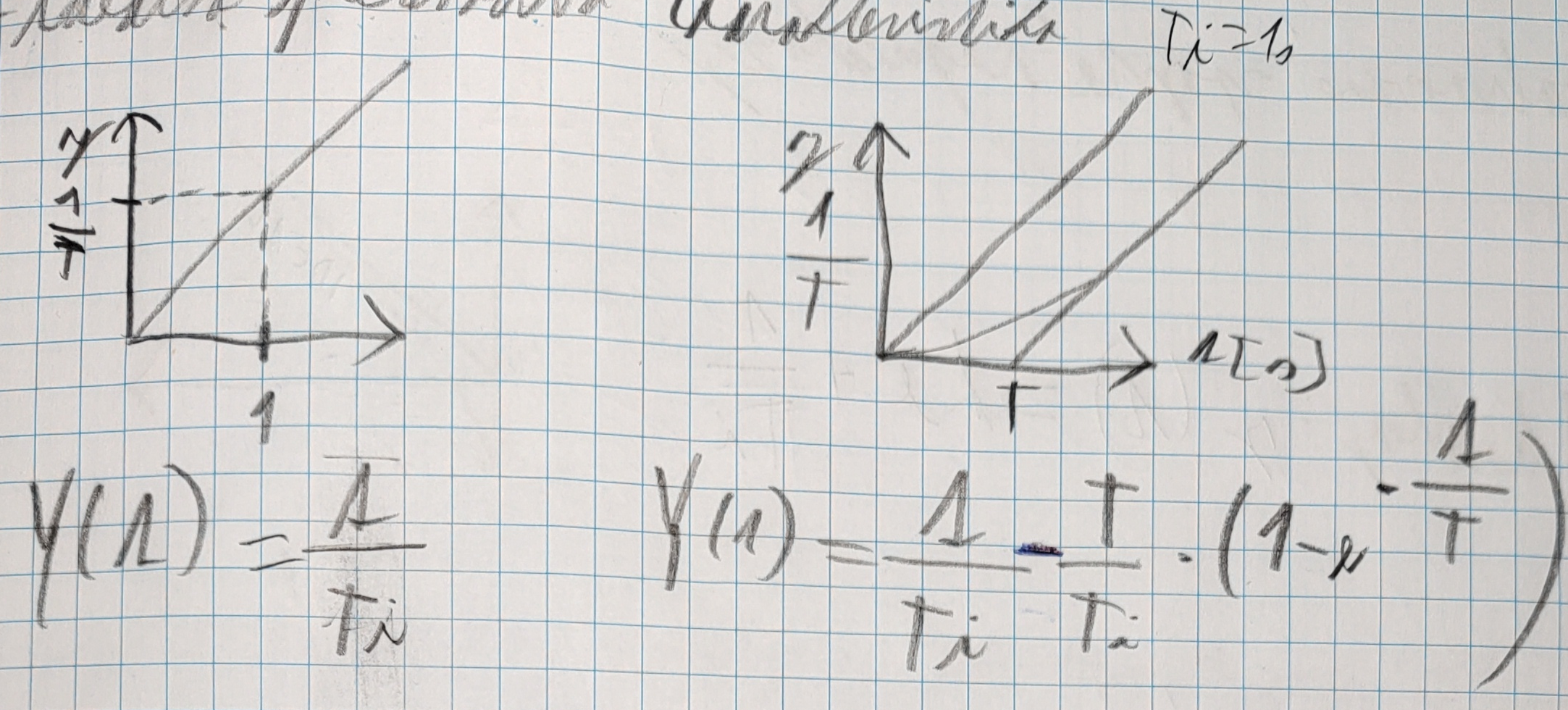 ím
je časová integrála väčšia, tým je strmosť menšia
ím
je časová integrála väčšia, tým je strmosť menšia
Samostatne sa nikdy nepoužíva (Len v kombinácii s P, PI)
skvalitňuje a urýchľuje reguláciu
I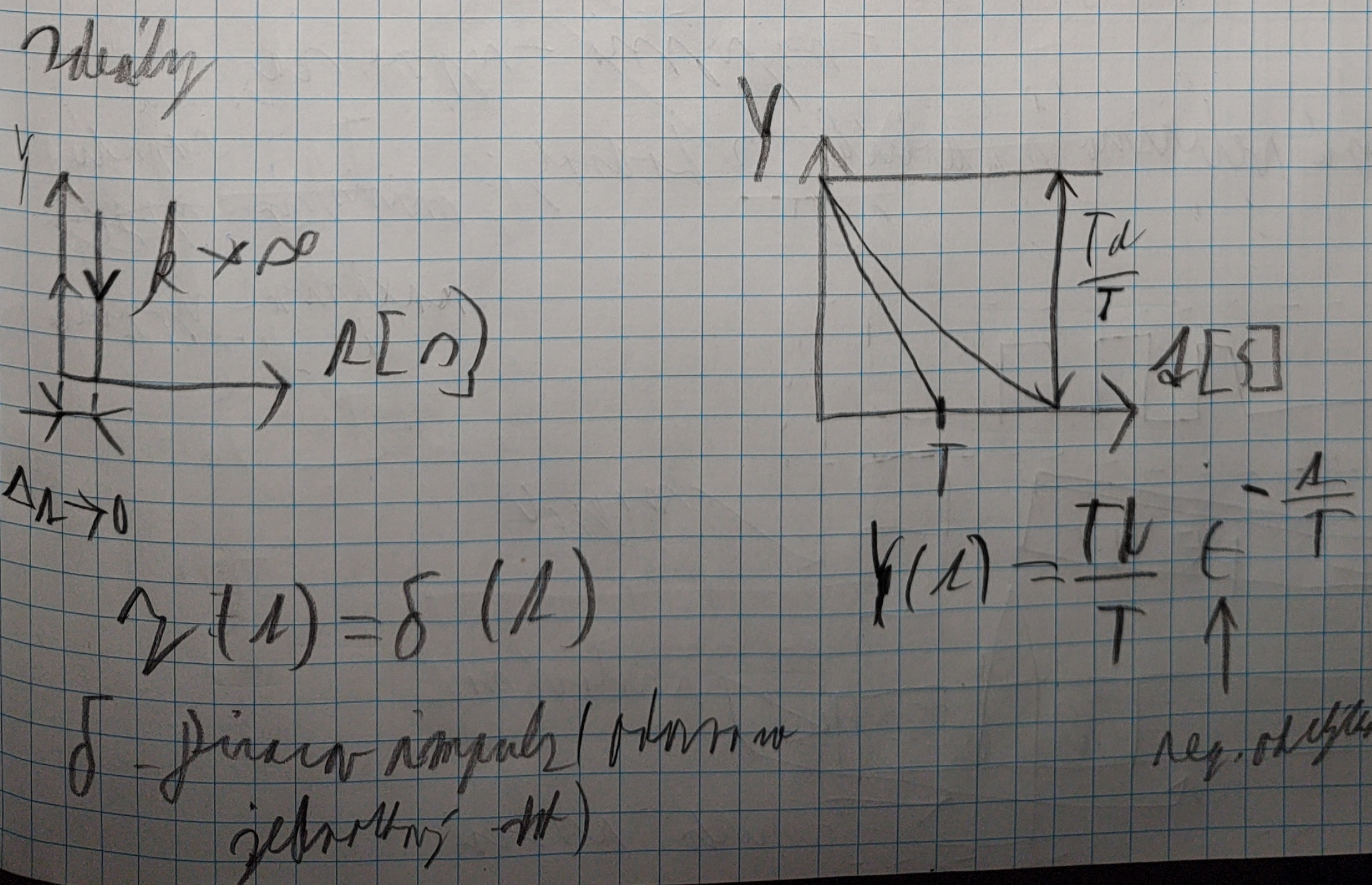 deálny
deálny
δ – Diracov impulz (odozva na jednotkový skok)
![]()
![]()
Ideálny:
![]()
 ?
?
Dvojpolohové nespojité regulátory
Trojpolohové
Viacpolohové
Nespojité regulátory analogicky odvodené od základných spojitých regulátorov:
P – Proporčný
S – Sumačný
D – Diferenčný
Kombinované:
PD
PS
PSD
Zložité:
extremálne
číslicové korekčné členy
Na rozdiel od spojitých regulátorov pracujú len v určitých časových okamihoch – čiže pracujú nespojito v čase
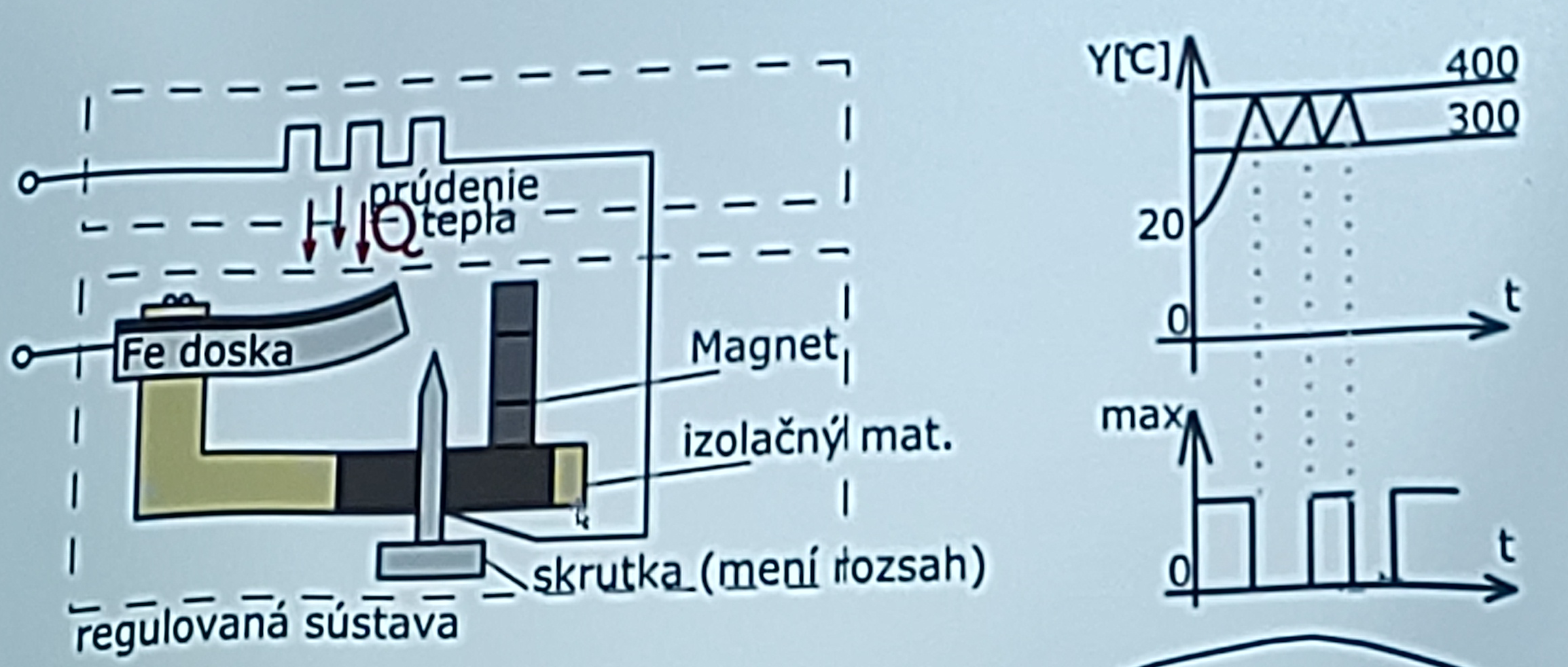
Termostat
Nastavený? Interval hodnôt:
najnižšia – zapne sa
najvyššia – vypne sa
akčná veličina nadobúda 2 hodnoty:
minimum – zapnuté
maximum – vypnuté
určujú kvalitu regulácie
pri voľbe regulátora treba prihliadať na prenosové vlastnosti
cieľom regulátora je, aby sa prenos riadenia v čo najširšom pásme blížil k ? a pomaly k 0
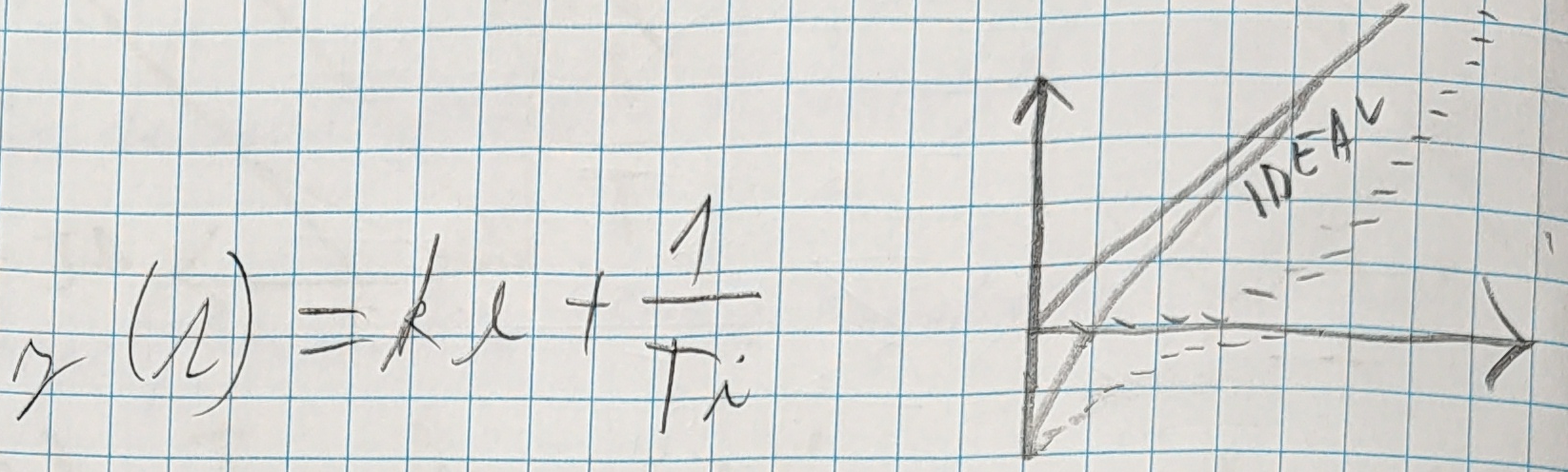
proporcinálny (proporčný)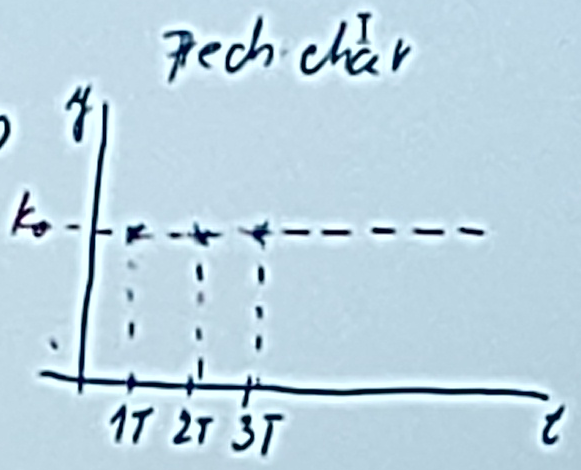
algoritmus
algoritmus regulácie: yn = k0 * en
![]()
pre astatické sústavy
![]()
![]()
![]()
sumačný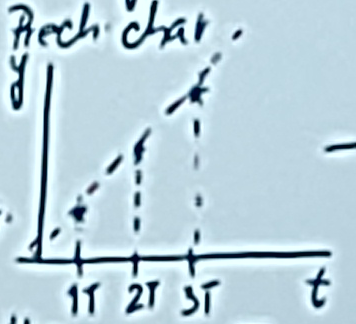
odvodený od integračného(I)
![]()
algoritmus regulátora:
![]()
{alebo iny slide tam ma i = 1}
T – perióda vzorkovania
ts – časová sumačná konštanta
ei – regulačná odchýlka
i – krok
statické sústavy
![]()
![]()
![]()
![]()
diferenčný
odvodený od derivačného(D)
![]()
algoritmus
![]()
![]() :
- tieto netreba vedieť
:
- tieto netreba vedieť
dvojbodová diskrétna aproximácia derivácie
![]()
![]()
![]()
![]()
![]()
- štvorbodová stredná diferencia
![]()
![]()
![]()
![]()
![]()
P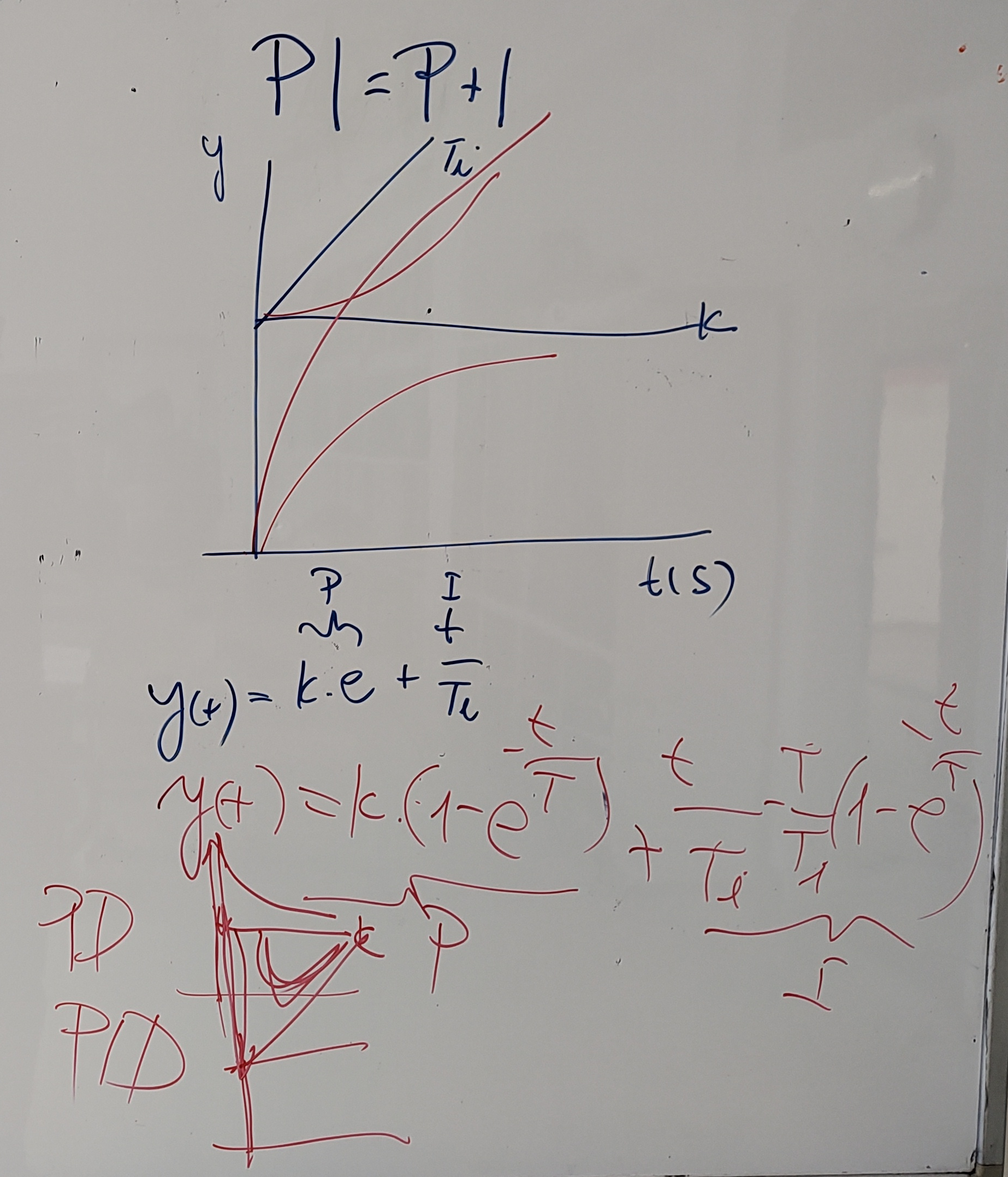 SD
SD
Porovnajte 2 regulátory typu P(e = 1 [ideálne]), ak:
1. regulátor má zosilnenie 5 (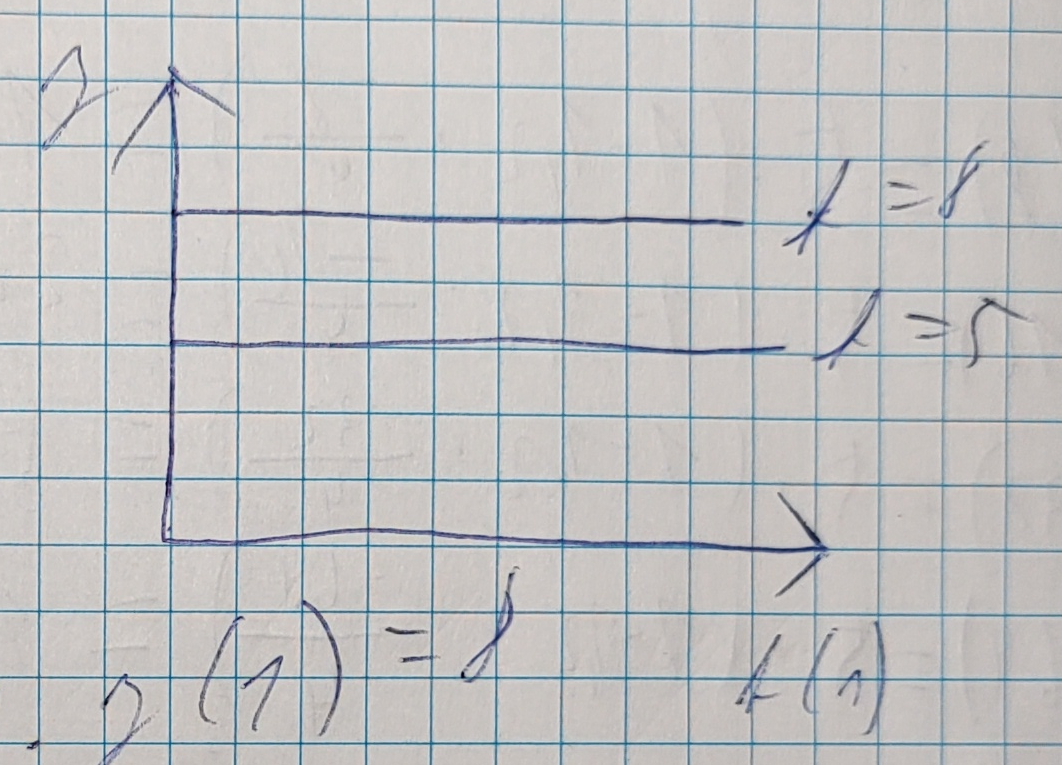 k
= 5)
k
= 5)
2. regulátor má zosilnenie 8 (k = 8)
![]()
1.
![]()
2.
![]()
Porovnajte prechodové charakteristiky spojitého P s oneskorením 1. rádu
![]()
e = 1,2
k = 5
1.
T1 = 2s
![]()
treba vypočítať 4, 8, 16, 32s
![]()
![]()
![]()
![]()
2.
T1 = 4s
![]()
treba vypočítať 8, 16, 32, 64s
![]()
![]()
![]()
![]()
Grafy by to ešte chcelo
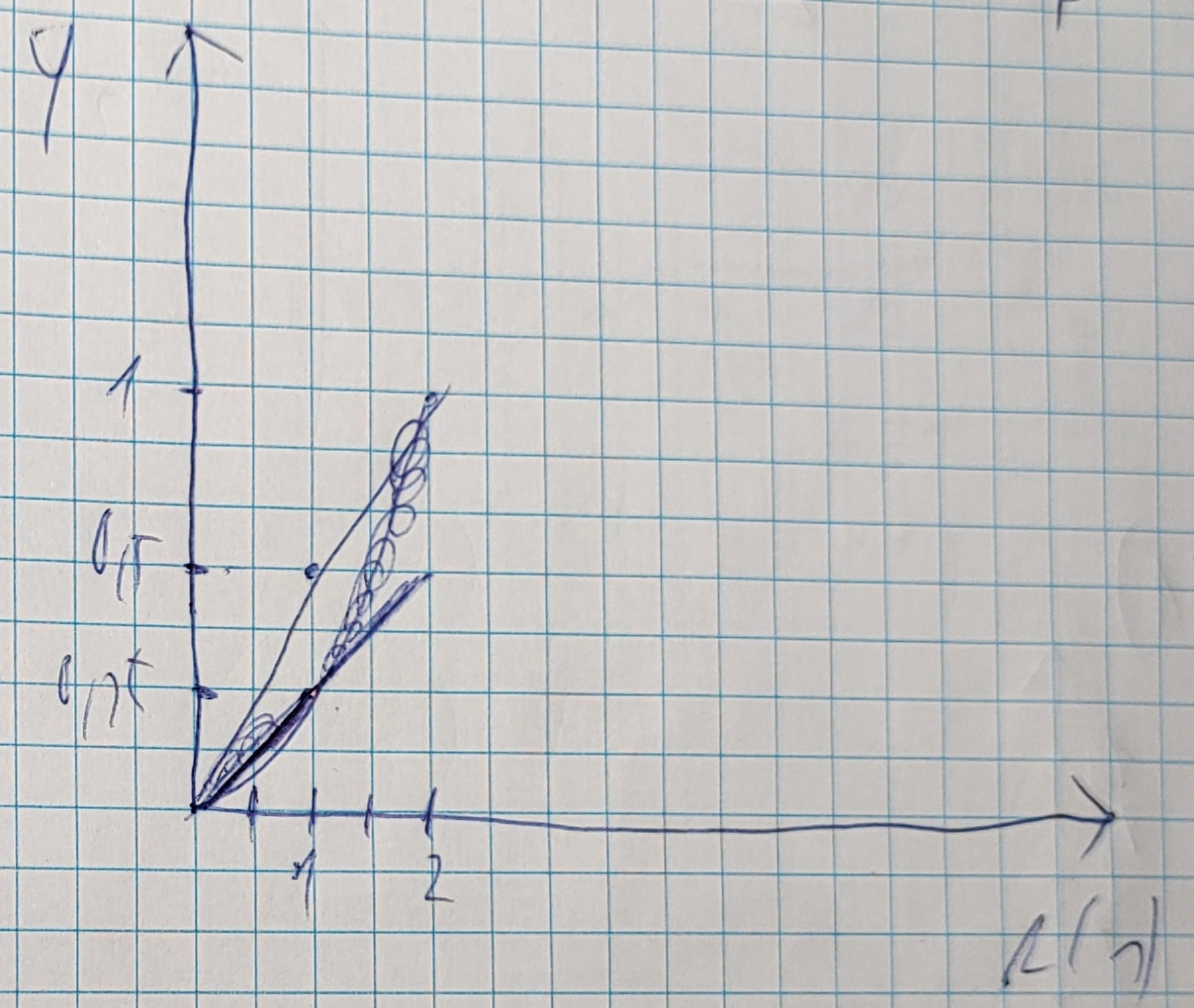
Spojitý I
e=1
1.
Ti1 = 2s
y(2) = 1
y(1) = ½
![]()
![]()
2.
Ti2 = 4s
y(2) = ½
y(1) = ¼
![]()
![]()
Čím väčšia integračná konštanta, tým menšia strmosť?
Porovnajte prechodovú charakteristiku O s oneskorením 1. rádu
e = 1,2
![]()
1.
Ti = 2s
T1 = 2s
![]()
2.
Ti = 4s
T2 = 4s
![]()
Graf by to chcelo
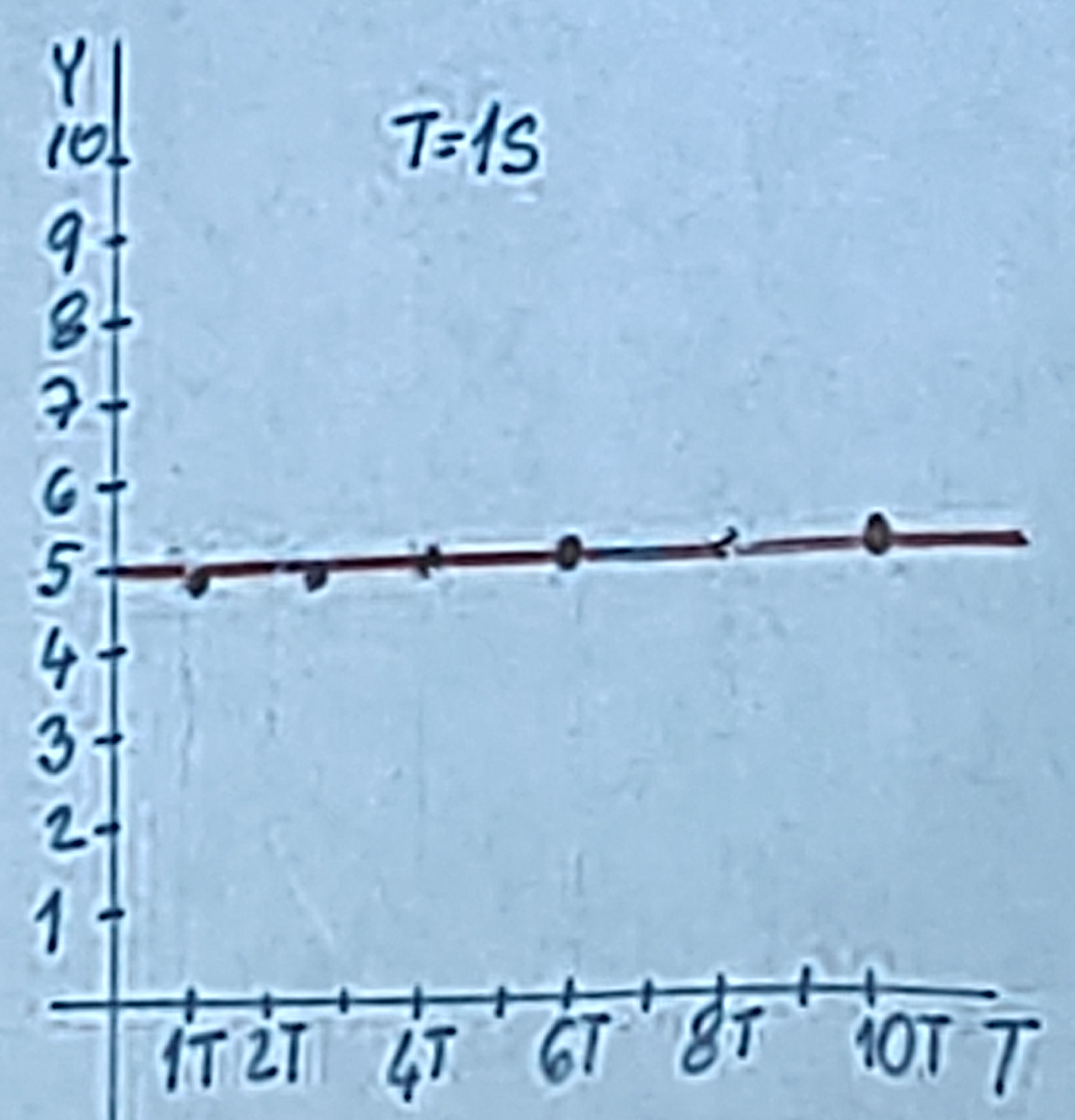
Pre periódu vzorkovania T = 1s vypočítajte Yn číslicového regulátora pre prvé 4 kroky
a) Regulátor P, k0 = 5s
![]()
b) Regulátor S, Ts = 2s
![]()
c) Regulátor D, TD = 10s
Pre dvojbodovú diskrétnu aproximáciu derivácie
d) Regulátor PSD, TD = 10s
Pre štvorbodovú strednú diferenciu
e) regulátor PSD, K0 = 2, Ts = 4s, TD = 6s
Pre dvojbodovú diskrétnu aproximáciu derivácie
![]()
y0 = 8,25 y1 = 2,5 y2 = 2,75 y3 = 3 y4 = 3,25 y5 = 3,5 y6 = 3,75 y7 = 4
f) regulátor PSD K0 = 2, Ts = 4s, TD = 6s
Pre štvorbodovú strednú diferenciu
Riešenie:
Pre jednotlivý skok regulačnej odchýlky na vstupe regulátora platí
ei = 0 pre i < 0
ei = 1 pre i = 0, 1, 2, 3, …
Prenosové vlastnosti regulačných sústav – podľa nich navrhujeme regulátor
regulátor ovplyvňuje priebeh regulačného obvodu
rozdelenie regulačných obvodov:
podľa energie na prestavenie regulačného orgánu
priame – energia pochádza zo sústavy (splachovacia nádrž)
nepriame – energia sa dodáva
podľa časovej spojitosti signálu
spojité regulátory
nespojité regulátory
podľa časového oneskorenia
ideálne – bez oneskorenia RO
s oneskorením – prvého / druhého / n-tého rádu
podľa počtu regulovaných veličín
jednoduché regulačné obvody (1 veličina, 1 regulátor)
regulačný obvod s reguláciou na konštantnú hodnotu w = h?
Programovaná regulácia w = f(t)
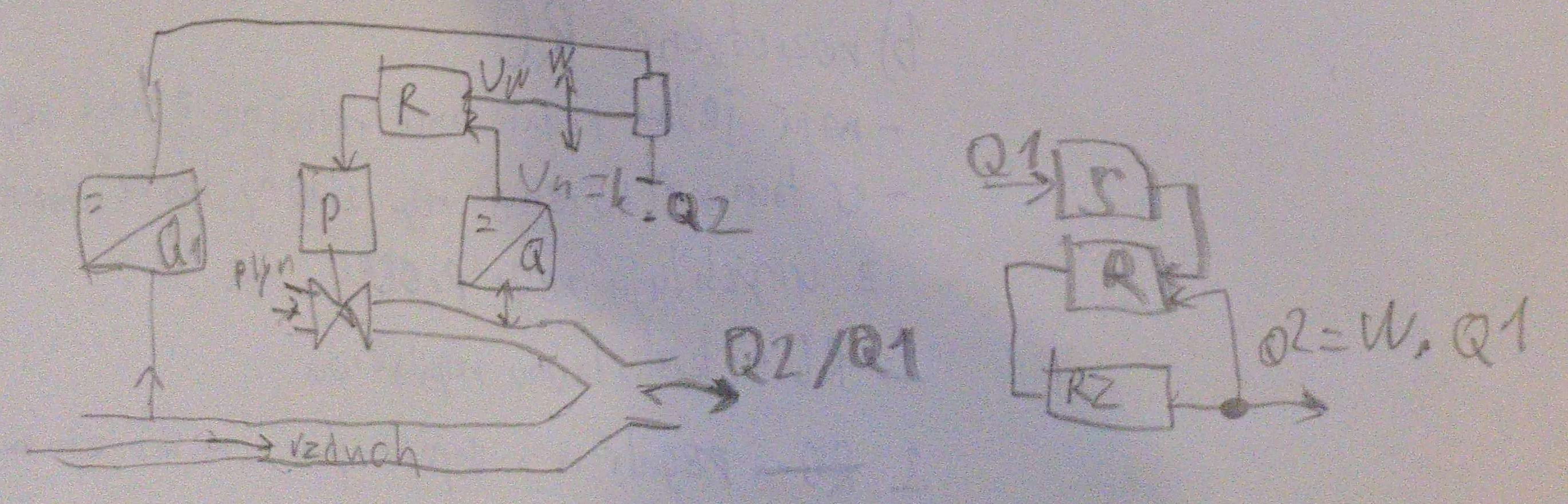
Vlečná regulácia (pomerová): w = f(X)
rozvetvené RO
majú jednu regulovanú veličinu a viac regulátorov
sú tam vytvorené regulačné slučky, ktoré skvalitňujú a urýchľujú regulačný proces
Regulačné obvody s kaskádovou reguláciou
Regulácia s dopravným oneskorením
Regulačné obvody s pomocnou akčnou veličinou
Regulačné obvody s dopravným oneskorením
Jedna regulovaná veličina a jeden regulátor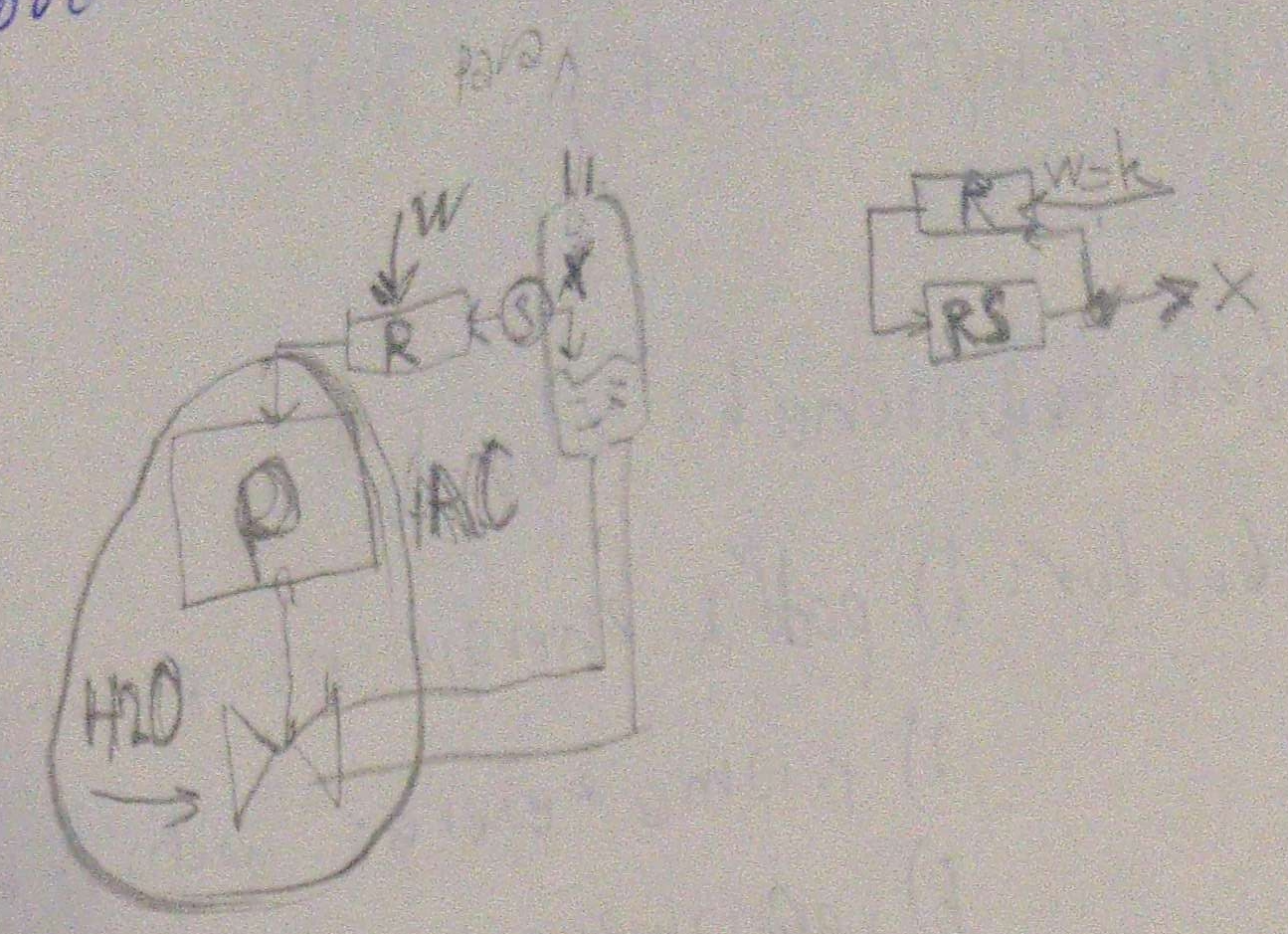
S – Stavoznak s odporovým výtlačom
R – Regulátor
P – Pohon
RS – regulovaná sústava
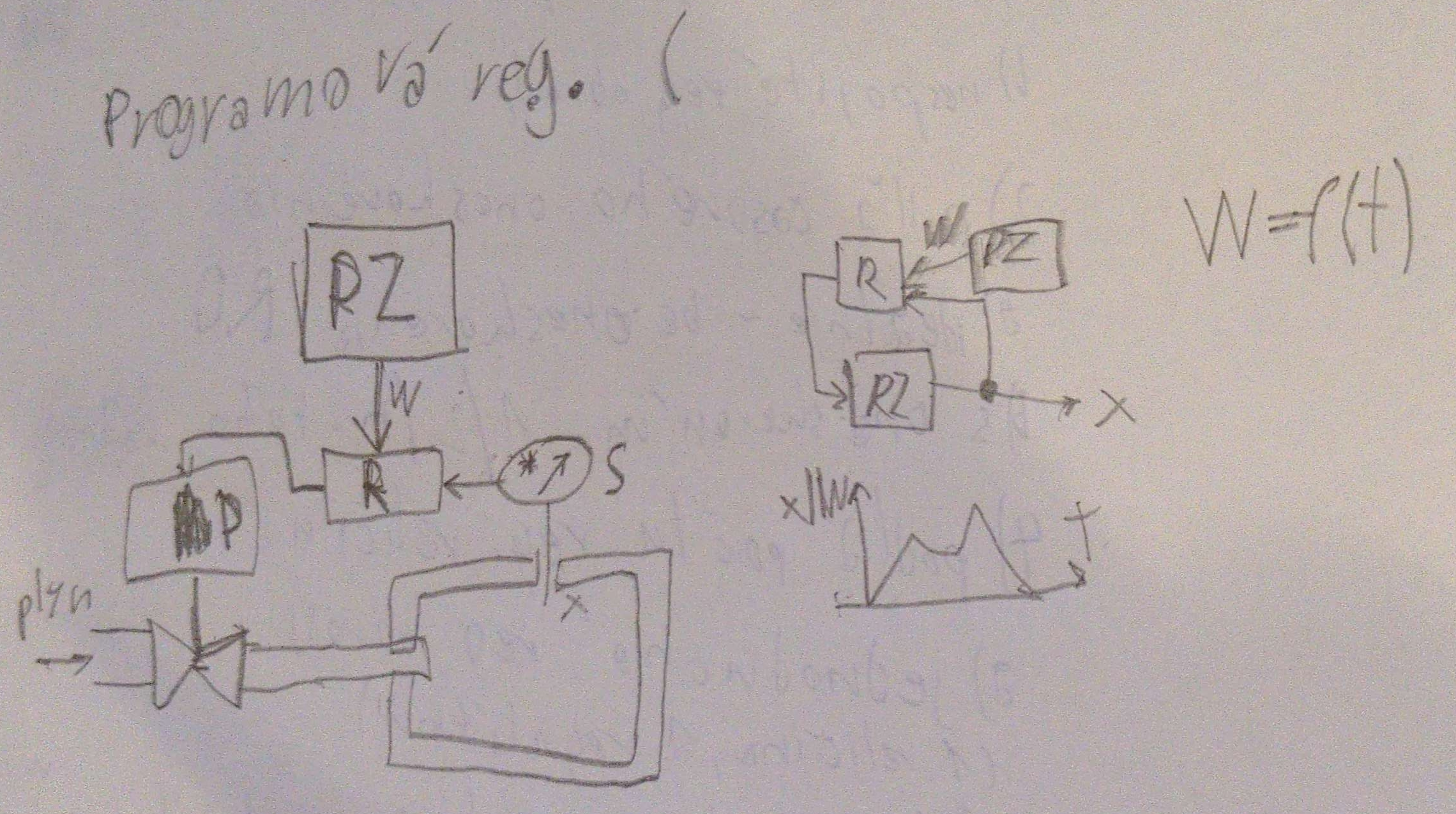
PZ – programovacie zariadenie
S – snímač teploty
r egulačné
obvody s kaskádovou reguláciou
egulačné
obvody s kaskádovou reguláciou
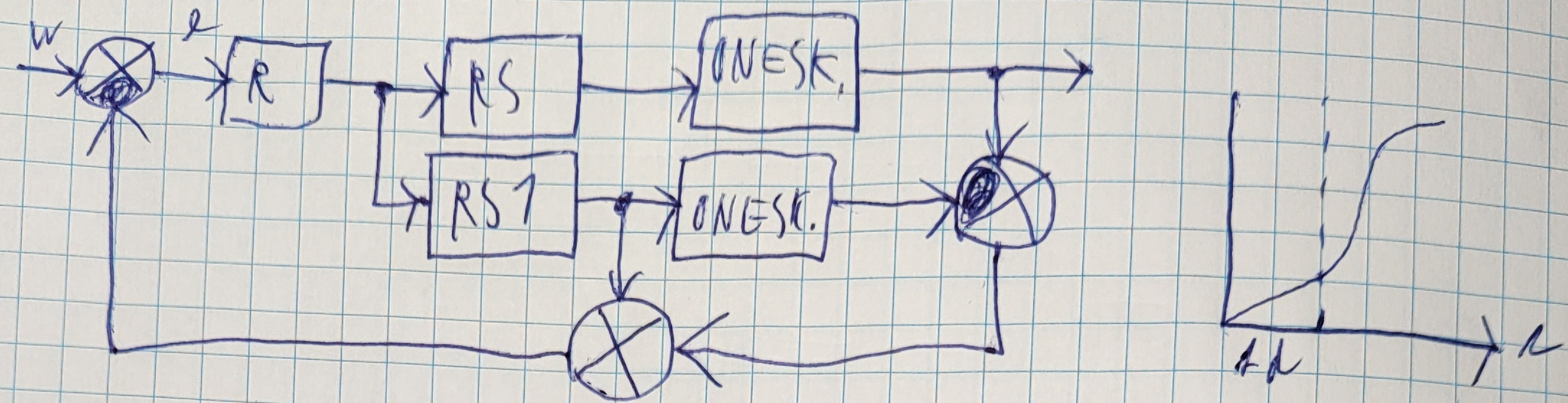
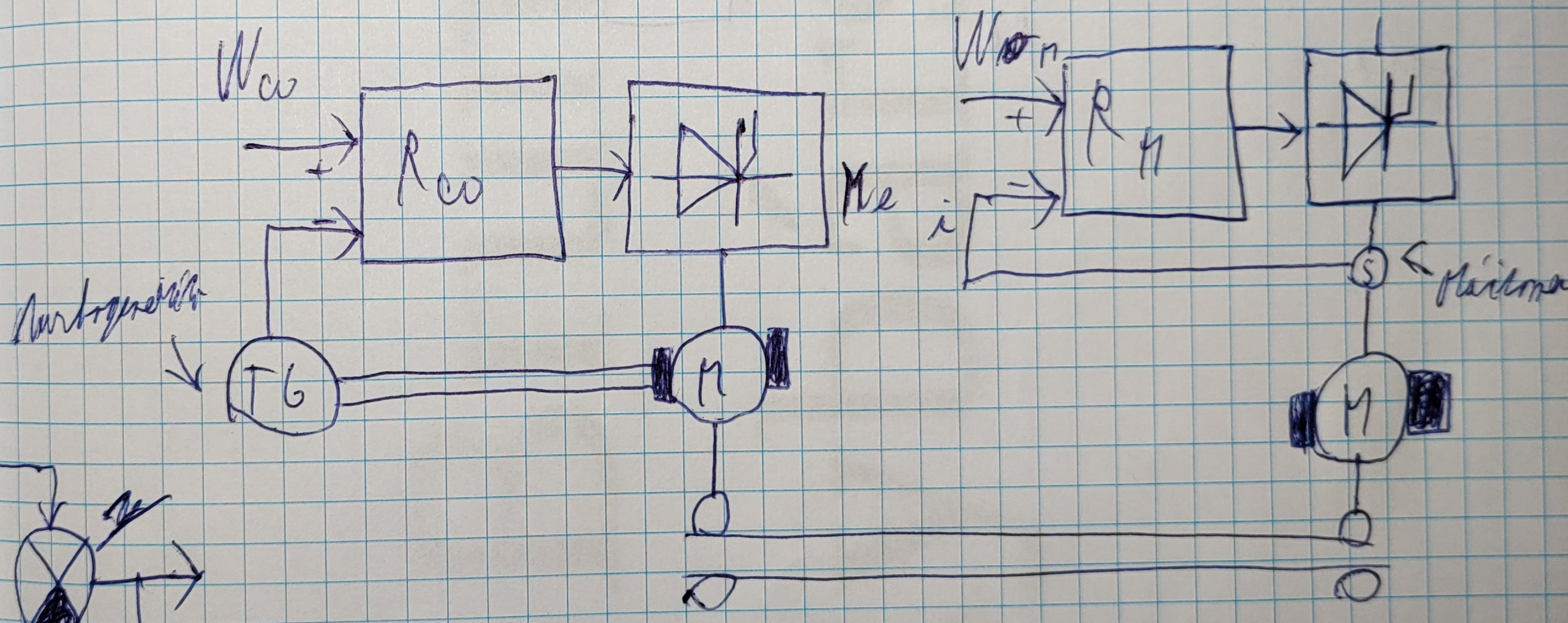
Regulácia teplej prehriatej vody vo výmenníku kotla
Pomocná akčná veličina sa zavádza, aby sa vylepšila stabilita regulačného obvodu a lepšie prebiehalo sledovanie riadiacej veličiny
Z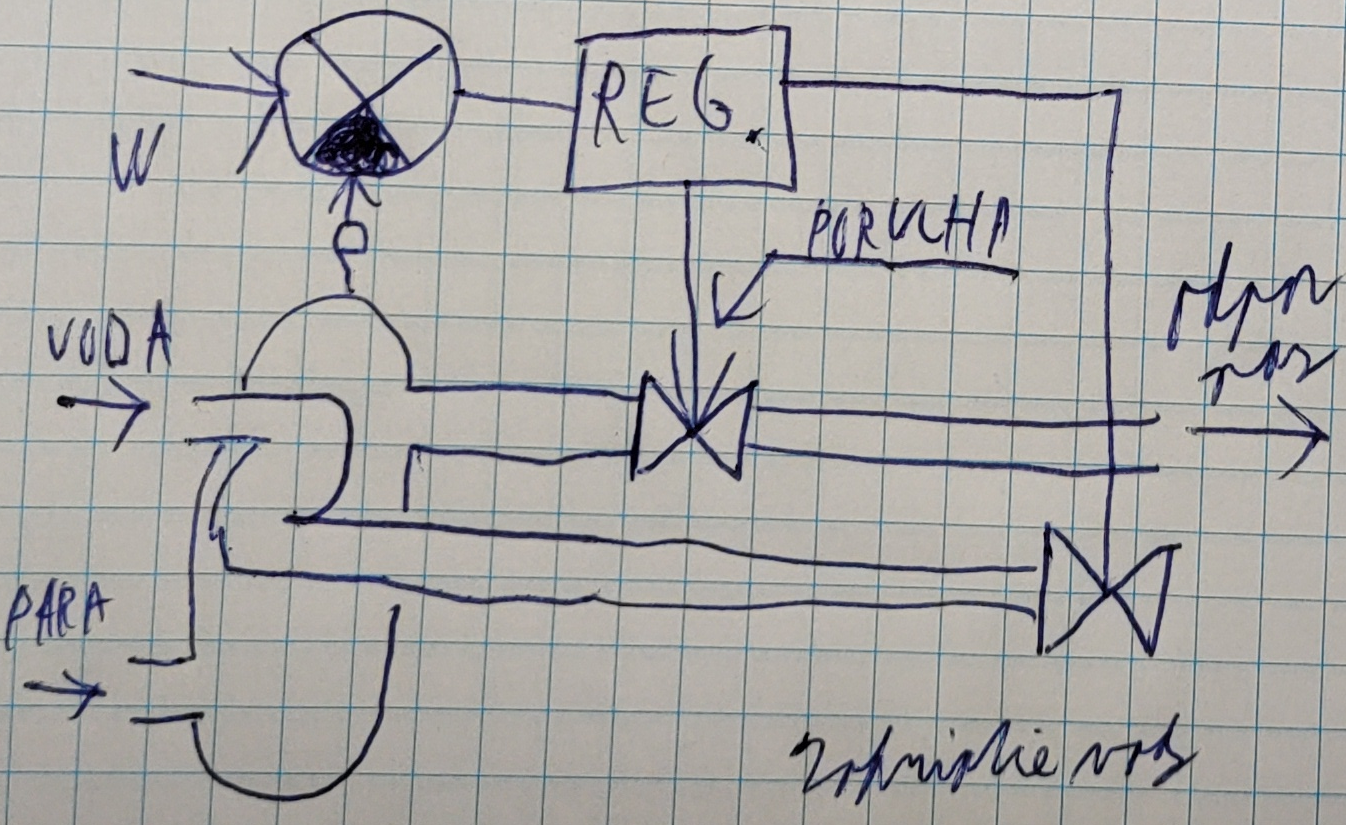 ohriatie
vody na požadovanú veličinu
ohriatie
vody na požadovanú veličinu
Bloková schéma:
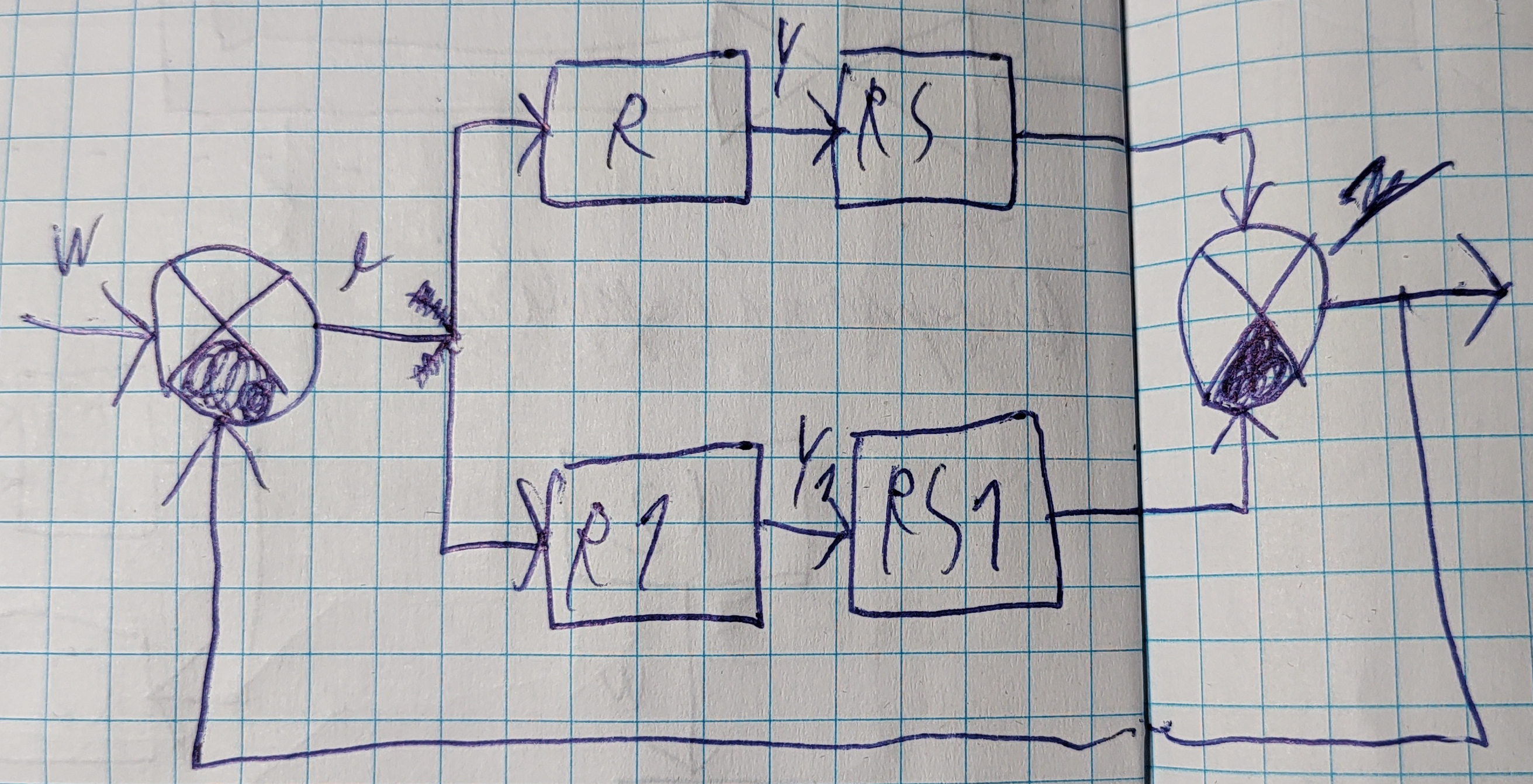
Viac regulovaných veličín a viac regulátorov
Zložené najčastejšie z viacerých jednoduchých regulačných obvodov
Musia spĺňať podmienku autonómnosti
Dvojparametrová regulácia – valcovacia trať:
 riama
regulácia
riama
regulácia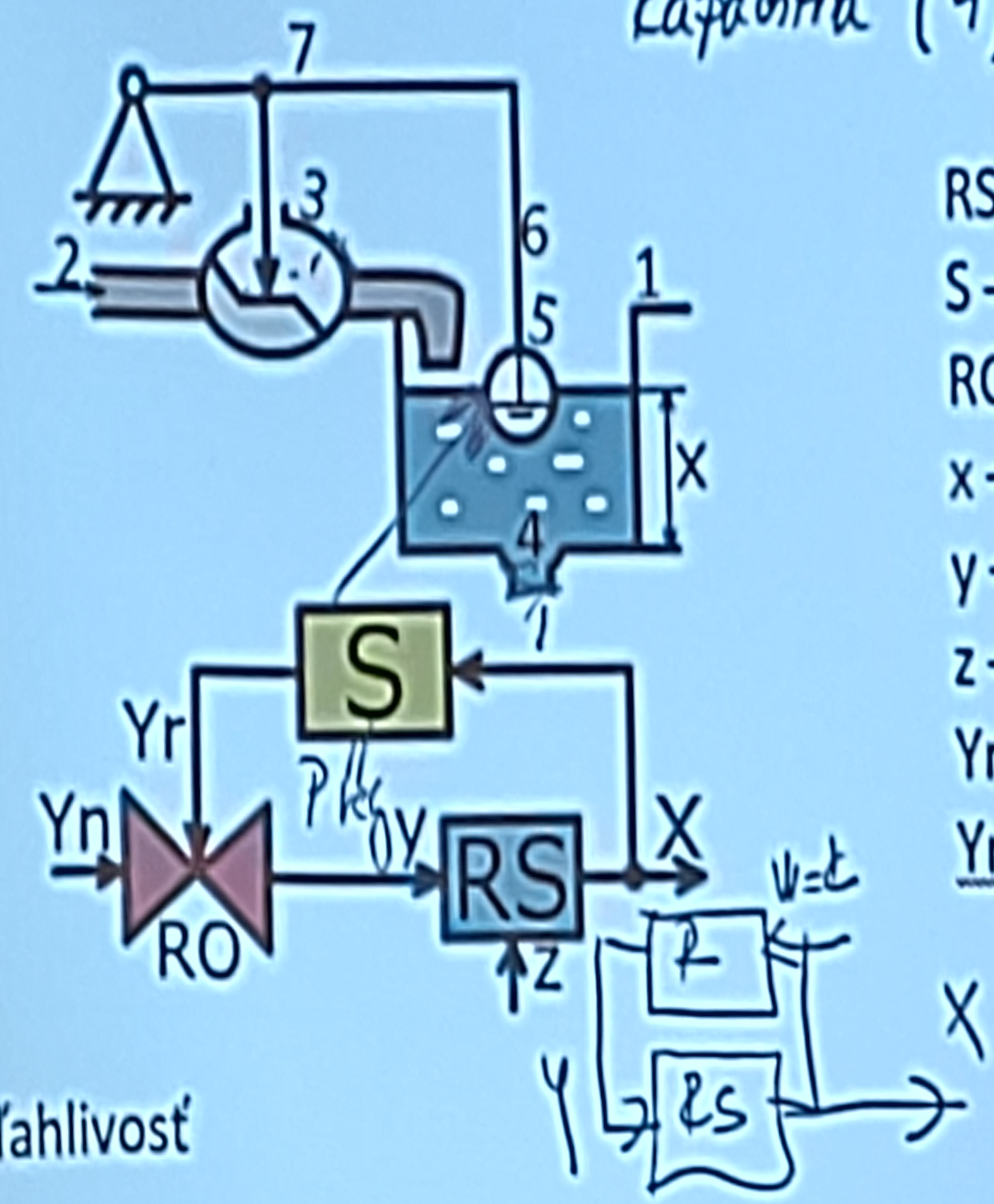
Nádrž
Vstupné potrubie
Regulačný ventil
Odtok
Plavák (snímač)
Ťahadlo plaváka
Páka
RS – regulovaná sústava
S – snímač
RO – regulačný orgán
x – regulovaná veličina
y - akčná veličina
z – poruchová veličina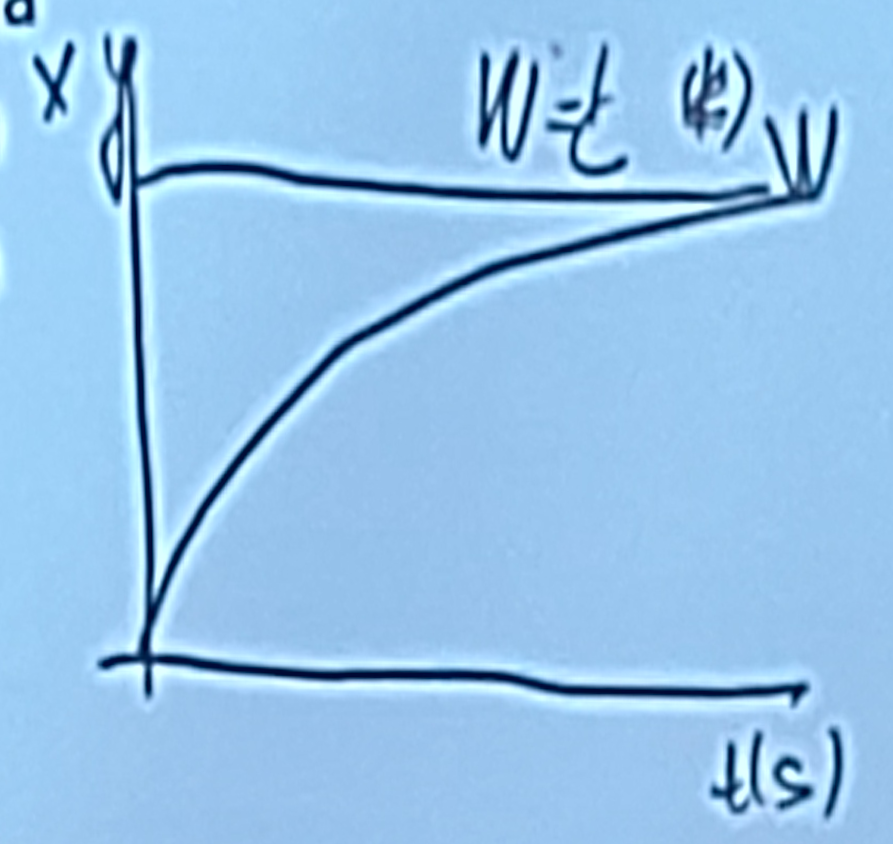
Yn – vstupná energia
Yr – opravná energia
Výhody:
Jednoduchosť
Spoľahlivosť
Nevýhody:
Nie je vždy možné energiu potrebnú pri prestavení regulačného orgánu odobrať zo sústavy
Regulačný obvod sa teoreticky môže nachádzať v troch stavoch:
rovnovážny
taký stav, kde pri vzniku poruchy sa regulačný obvod vychýli z rovnovážneho stavu
po zániku poruchy sa vráti do rovnovážneho stavu
hranica stability
taký stav, kde regulačný obvod bude kmitať konštantnými kmitmi s rovnakou amplitúdou medzi hornou a dolnou medzou stability
stačí veľmi malá chyba na to, aby z takéhoto obvodu vznikol nestabilný
![]() nestabilita
nestabilita
regulačný obvod prejde 1 alebo 2 h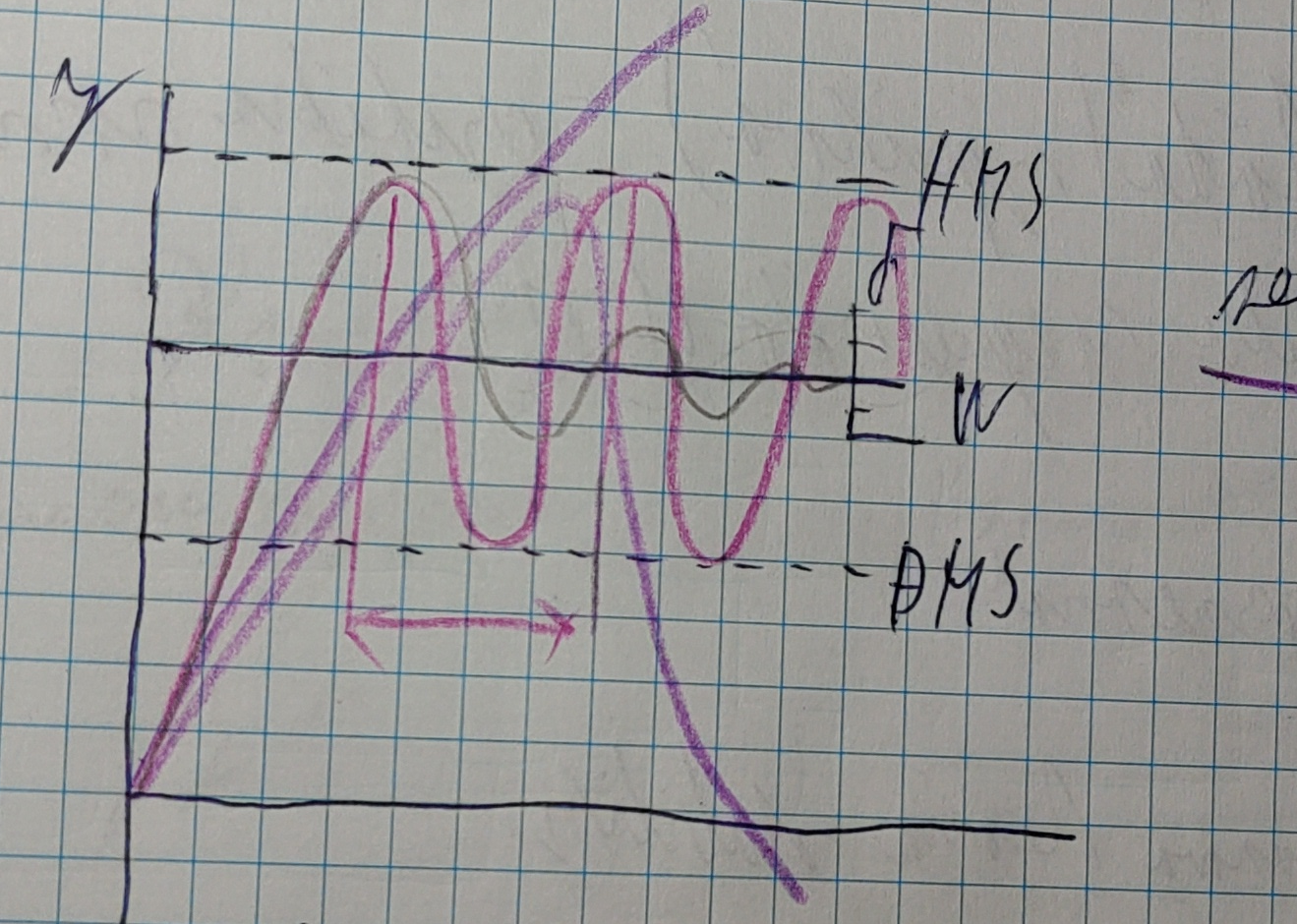 ranicou
stability
ranicou
stability
Algebrická metóda (výpočtová)
vychádza zo známeho metamatického modelu regulačného obvodu
![]() metódy
stačí len ???
metódy
stačí len ???
Ljapunova teória stability
Stodolovo kritérium stability
Hurwiztovo kritérium stability
Routh – Hurwitzovo kritérium stability
Funkčné metódy Vychádzajú z frekvenčného prenosu otvoreného regulačného obvodu
Gypkinovo? kritérium stability
Nyquistovo kritérium stability
Heller – Venechovo? kritérium stability
Michajlovo – Leonardovo kritérium stability
určené presnosťou? regulácie dejmi, ktoré prebiehajú počas prechodového deja
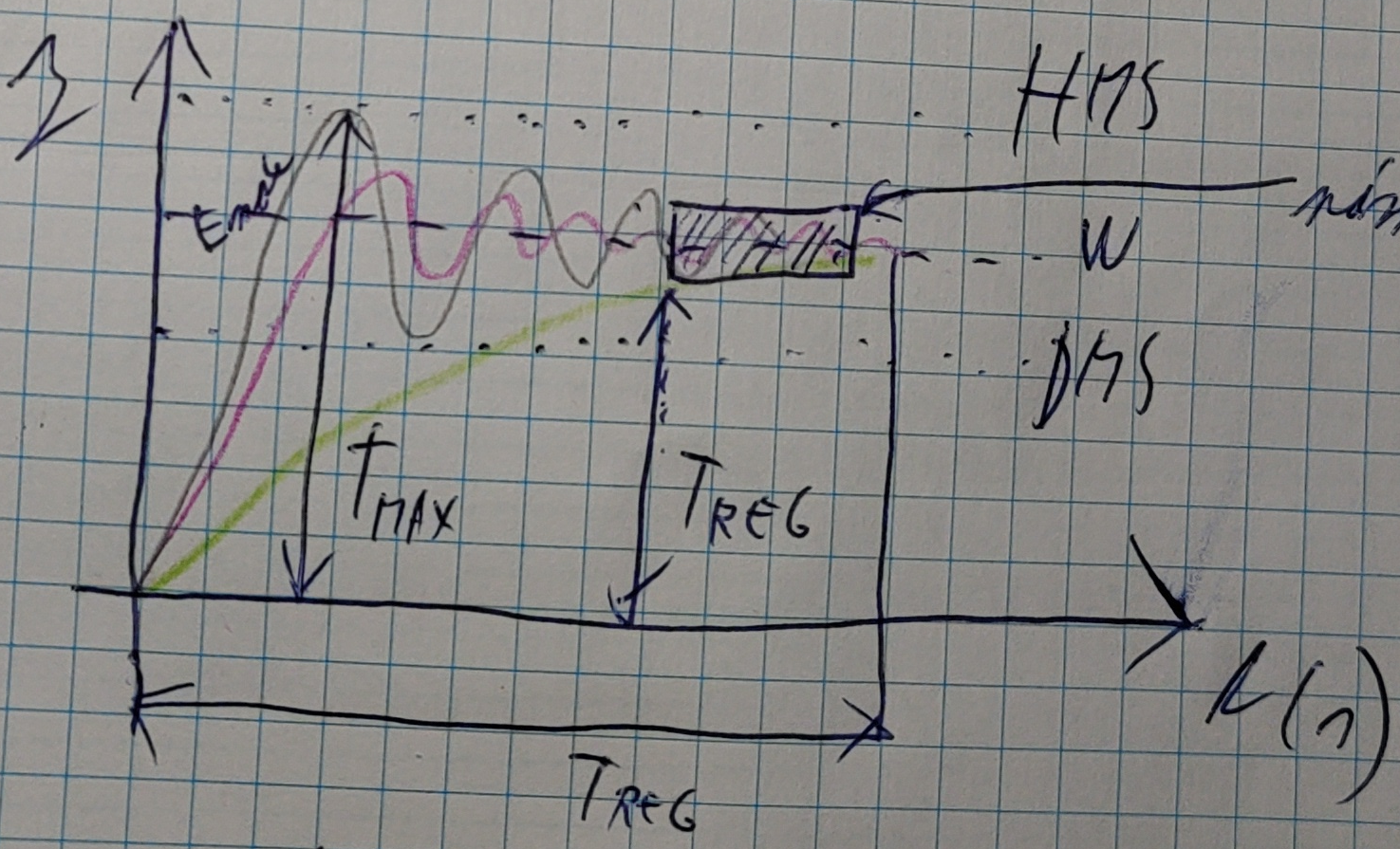
![]()
čím väčšie preregulovanie, tým by mala byť doba regulácie kratšia a kvalita regulačného obvodu väčšia
Tmax – čas dosiahnutia maximálneho
p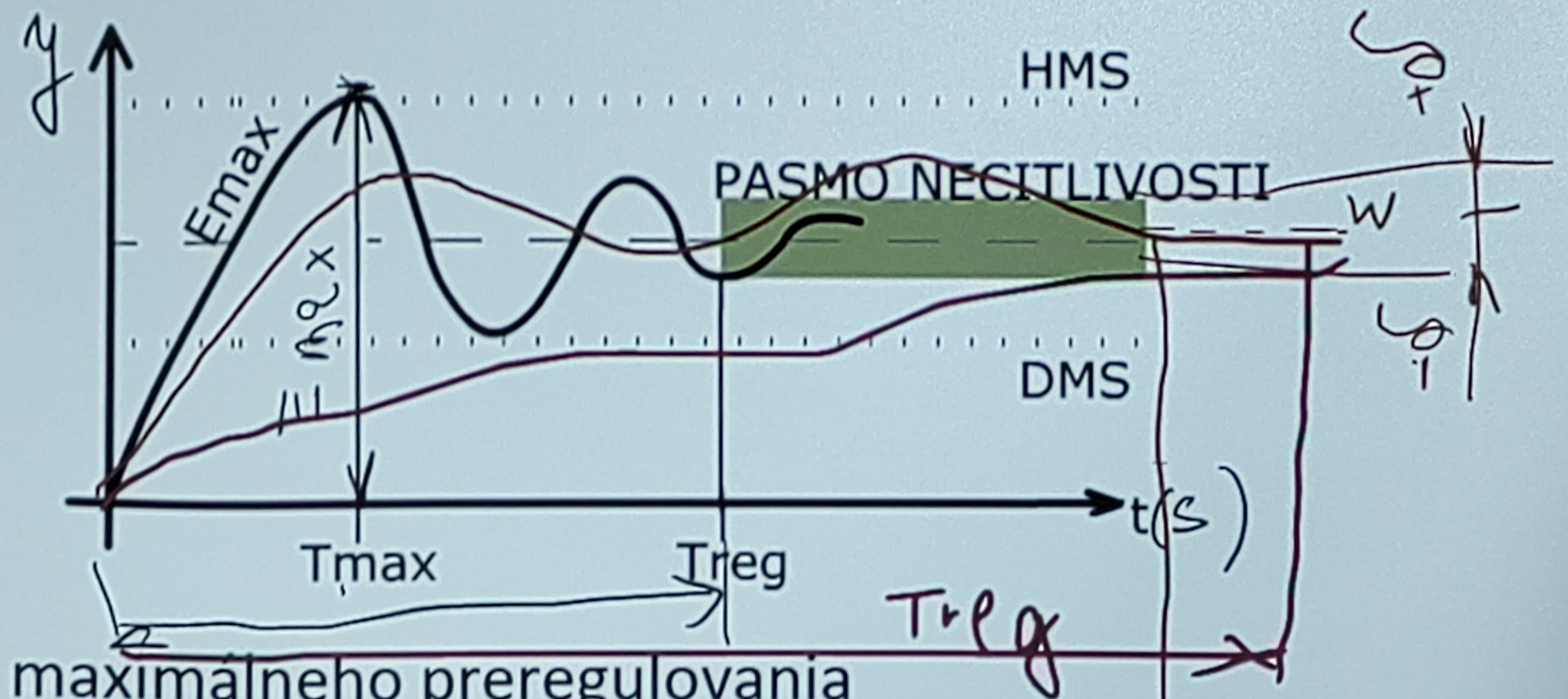 reregulovania
reregulovania
Emax – maximálna regulačná odchýlka regulovanej veličiny od ustálenej hodnoty regulovanej veličiny
patrí medzi nespojité riadenie
pri tomto type riadenia akčná veličina nadobúde 2 hodnoty (0,1)
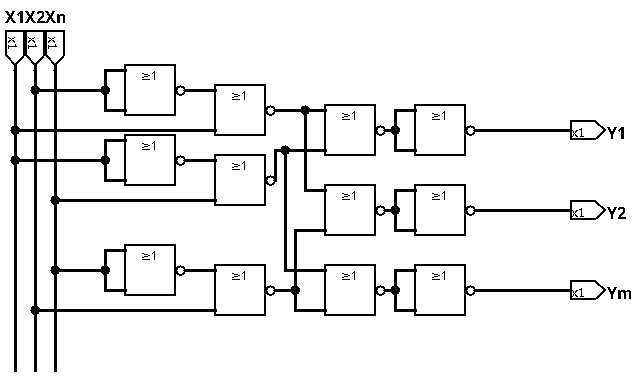
možná realizácia:
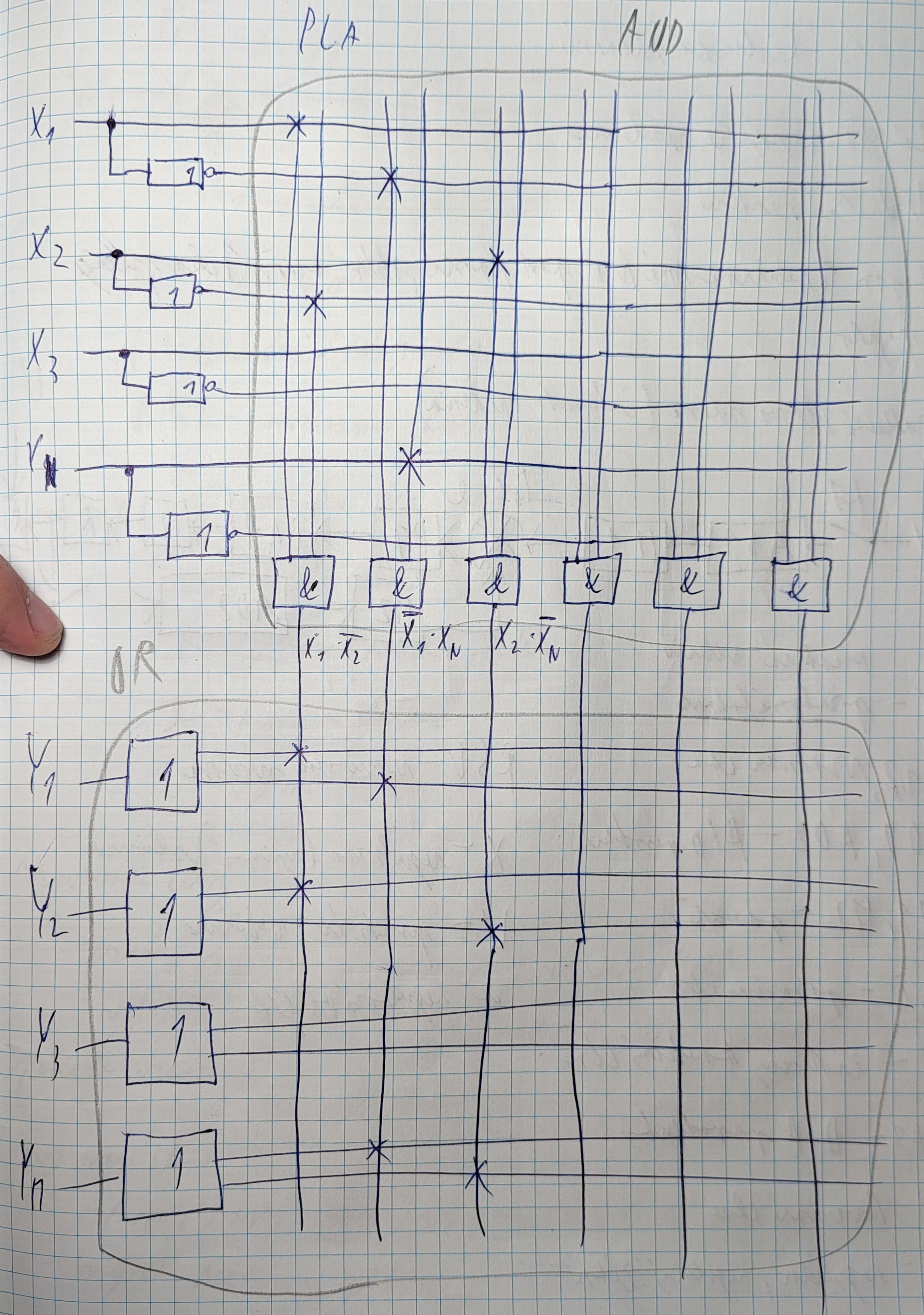
PLA polia
voľne programovateľné matice (FPGA?)
základné logické členy
základné pojmy:
kombinačné logické systémy:
stav výstupu závisí jednoznačne od okamžitých kombinácii vstupov
predchádzajúce kombinácie nemajú vplyv na nasledujúci stav
sekvenčné logické systémy:
stav výstupu závisí nielen od okamžitej kombinácie vstupov, ale aj postupnosti vstupov v predchádzajucom stave (postupnosť – sekvencia)
predchádzajúce kombinácie majú vplyv na nasledujúci stav
systém logického obvodu:
postup pri ktorom zo zadaného správania technologického systému a požiadaviek na jeho správanie navrhujeme konkrétny logický obvod realizujúci tieto požiadavky
analýza logického obvodu:
postup pri ktorom sa overuje, či konkrétny logický obvod pracuje podľa daných požiadaviek
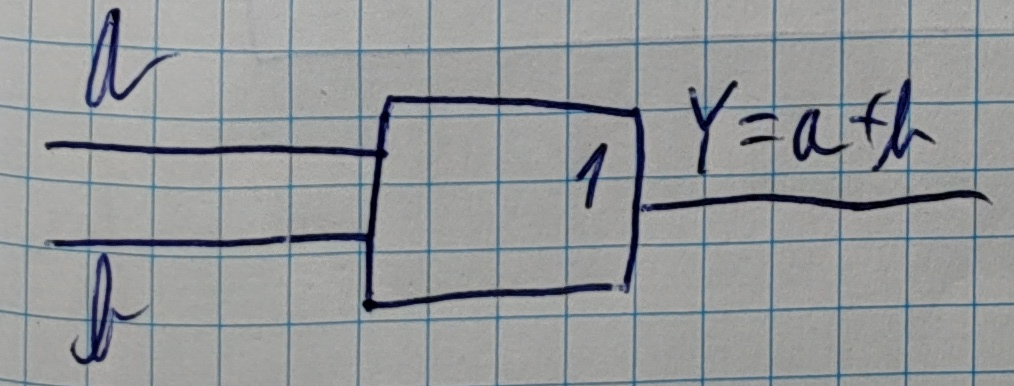
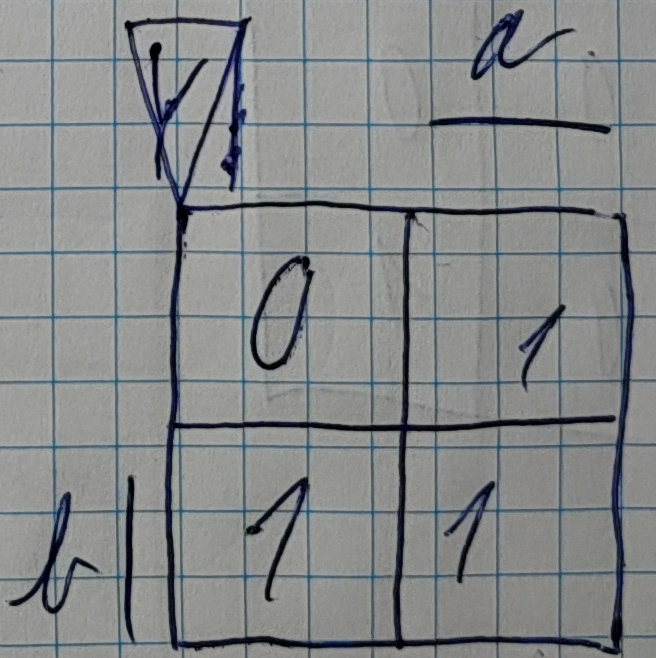
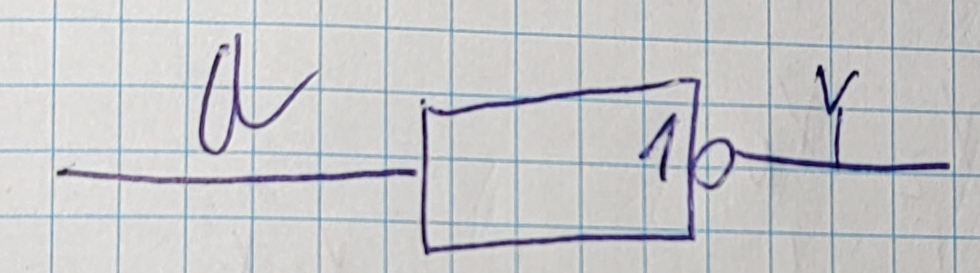
Logický súčet (OR)
Definícia:
Logická funkcia y nadobudne hodnotu logickej 1, keď nezávislá premenná a = 1 alebo b = 1 alebo a = 1 aj b = 1
Operácia zjednotenia (disjunkcie)
Logický zápis:
![]()
Algebraický zápis:
![]()
Pravdivostná tabuľka:
S |
a |
b |
Y |
0 |
0 |
0 |
0 |
1 |
0 |
1 |
1 |
2 |
1 |
0 |
1 |
3 |
1 |
1 |
1 |
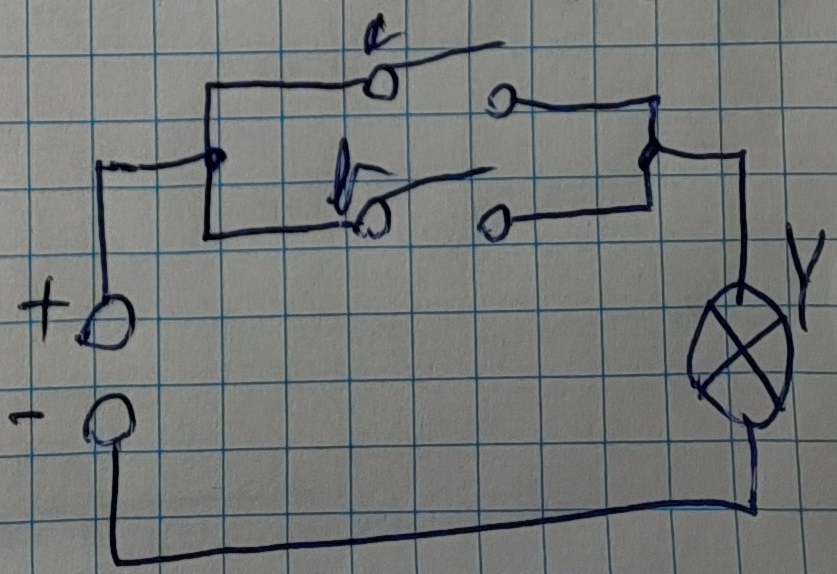
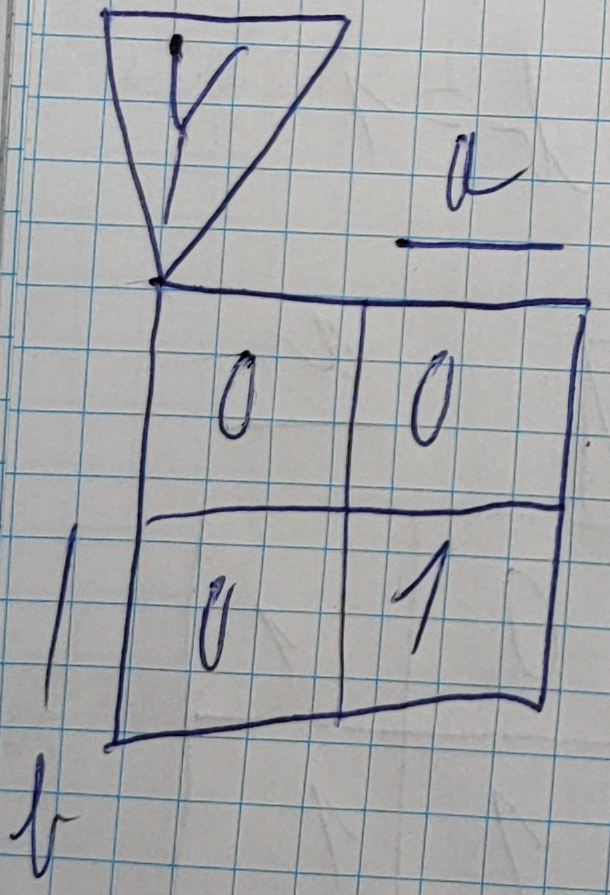
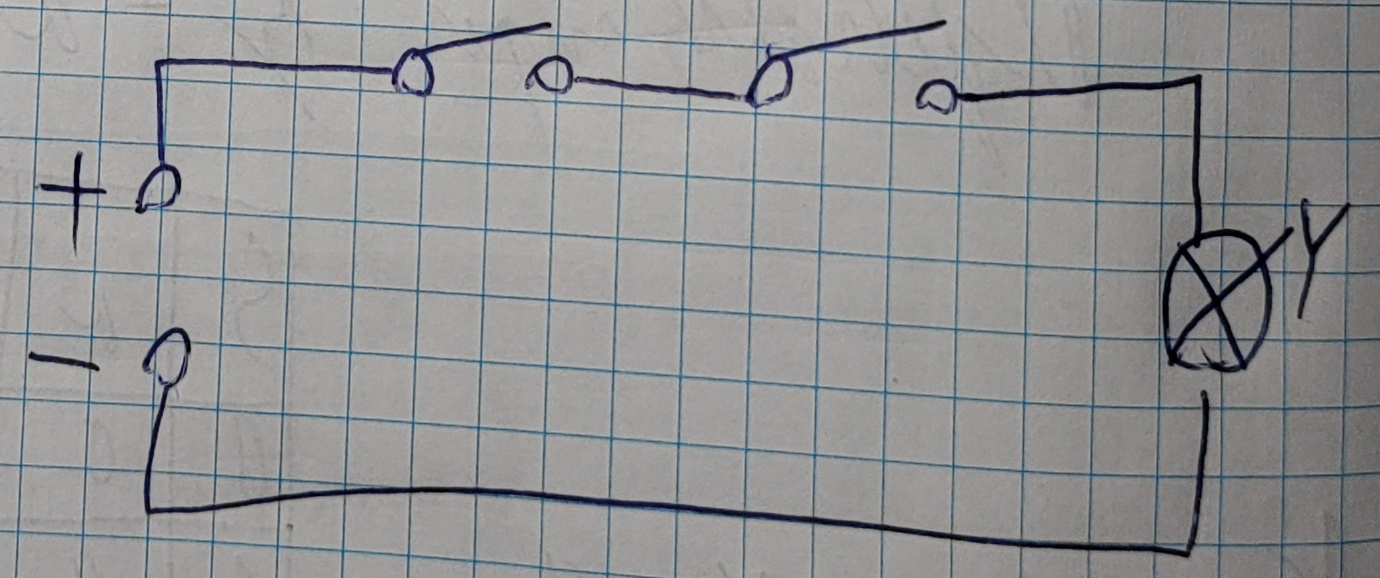
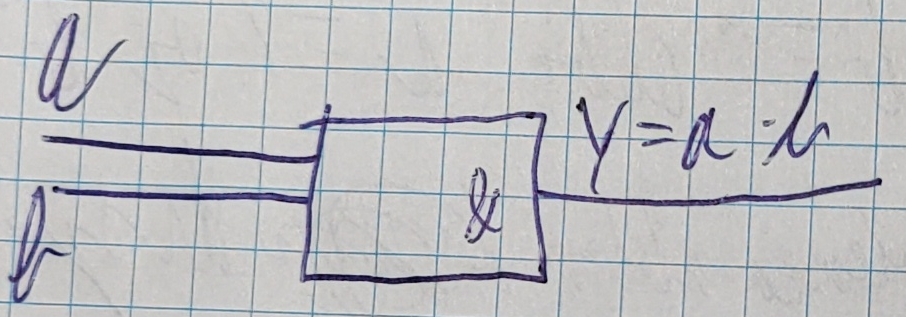
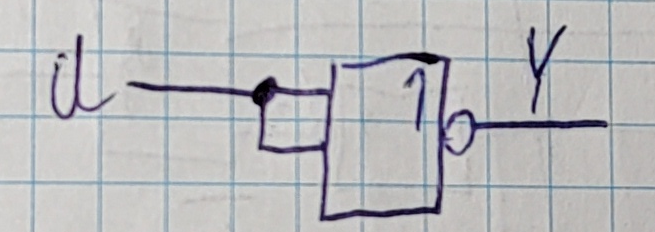
Logický súčin (AND)
Definícia:
Logická funkcia y nadobudne hodnotu logickej 1, keď nezávislá premenná a = 1 a súčasne nezávislá premenná b = 1
Operácia konjunkcie
Logický zápis:
![]()
Algebraický zápis:
![]()
Pravdivostná tabuľka:
S |
a |
b |
Y |
0 |
0 |
0 |
0 |
1 |
0 |
1 |
0 |
2 |
1 |
0 |
0 |
3 |
1 |
1 |
1 |
K
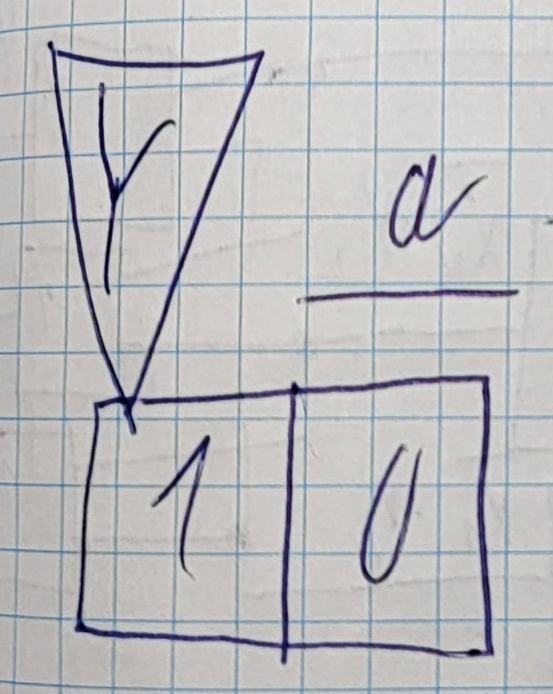
Logická negácia (NOT)
Definícia:
Logická funkcia y nadobudne hodnotu logickej 1, keď nezávislá premenná a = 0
Operácia negácie
Logický zápis:
![]()
Algebraický zápis:
![]()
Pravdivostná tabuľka:
S |
a |
Y |
0 |
0 |
1 |
1 |
1 |
0 |
![]()
![]()
![]()
NOT, AND, OR
NAND
NOR
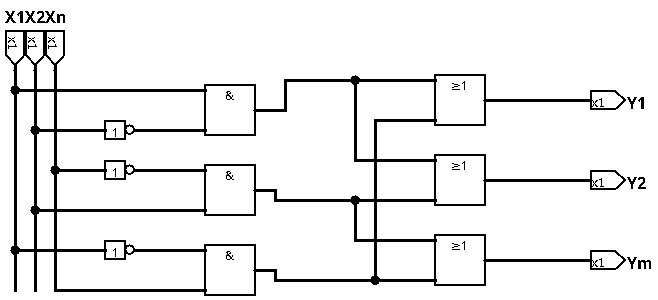
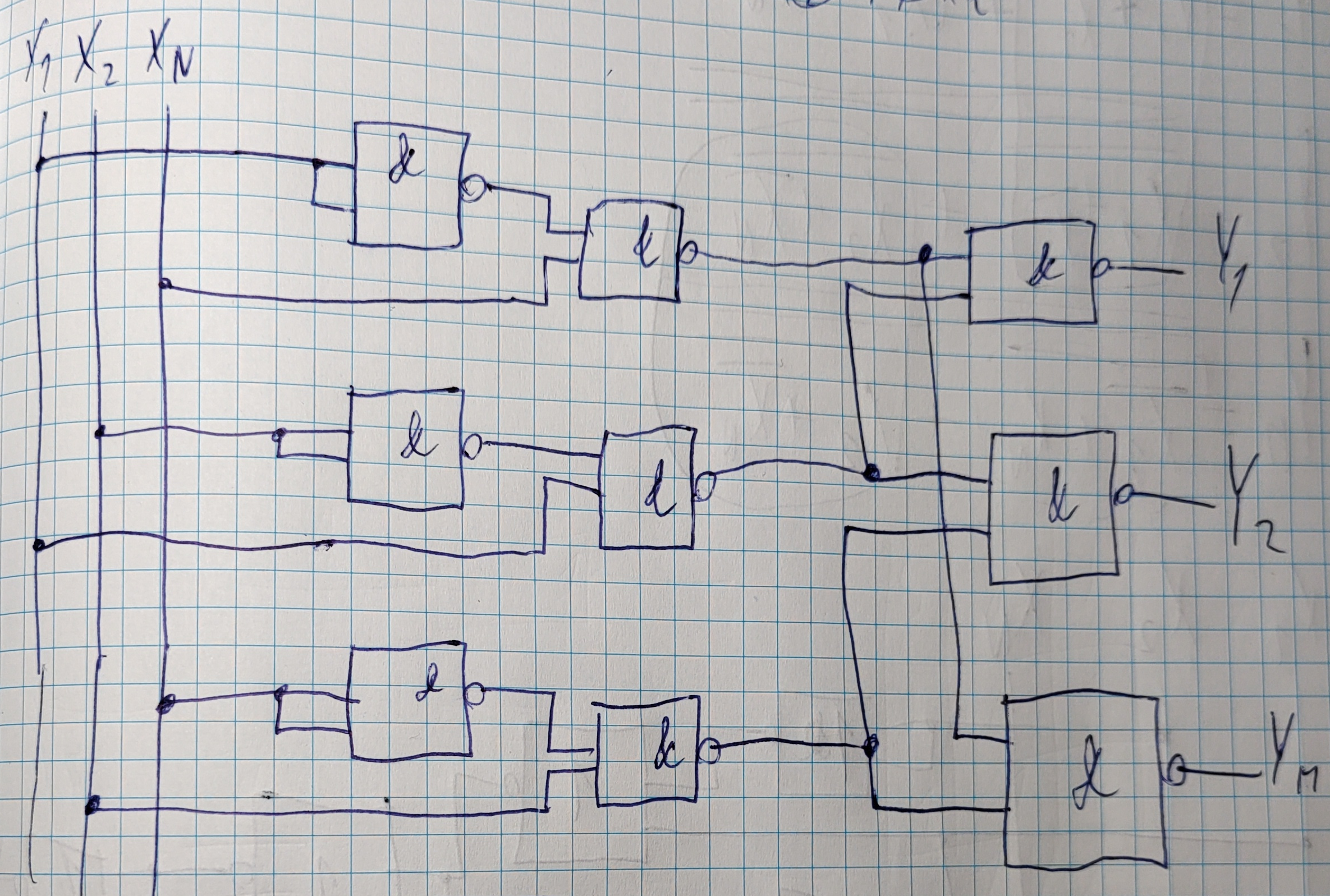
PLA {nand a nor verzie dufam ze su spravne}
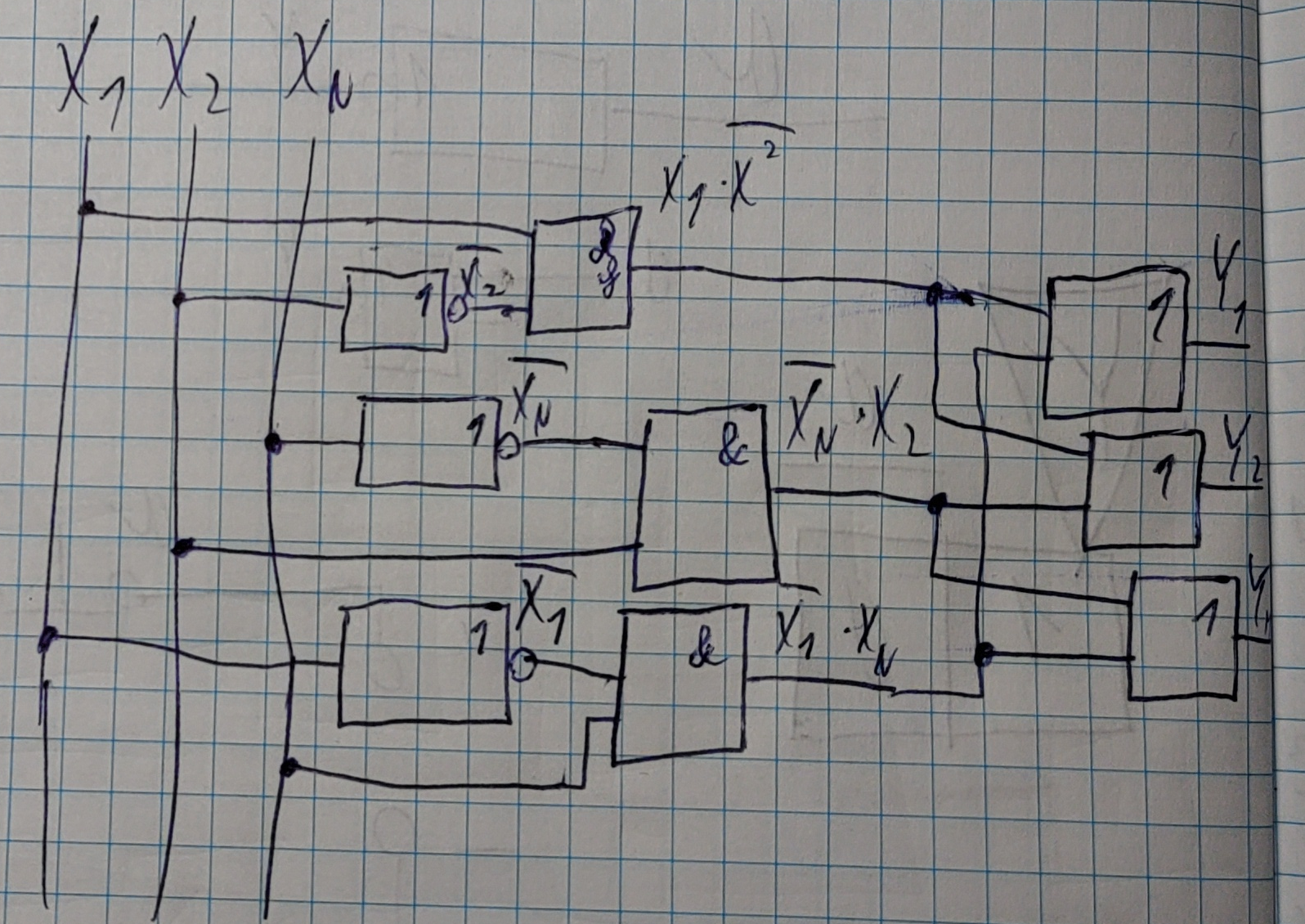
NAND verzia
![]()
![]()
![]()
![]()
![]()
![]()
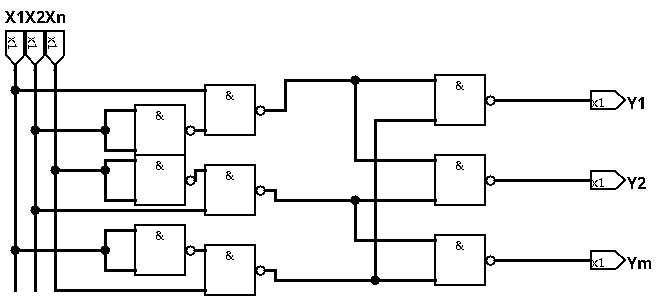
NOR verzia
![]()
![]()
![]()
t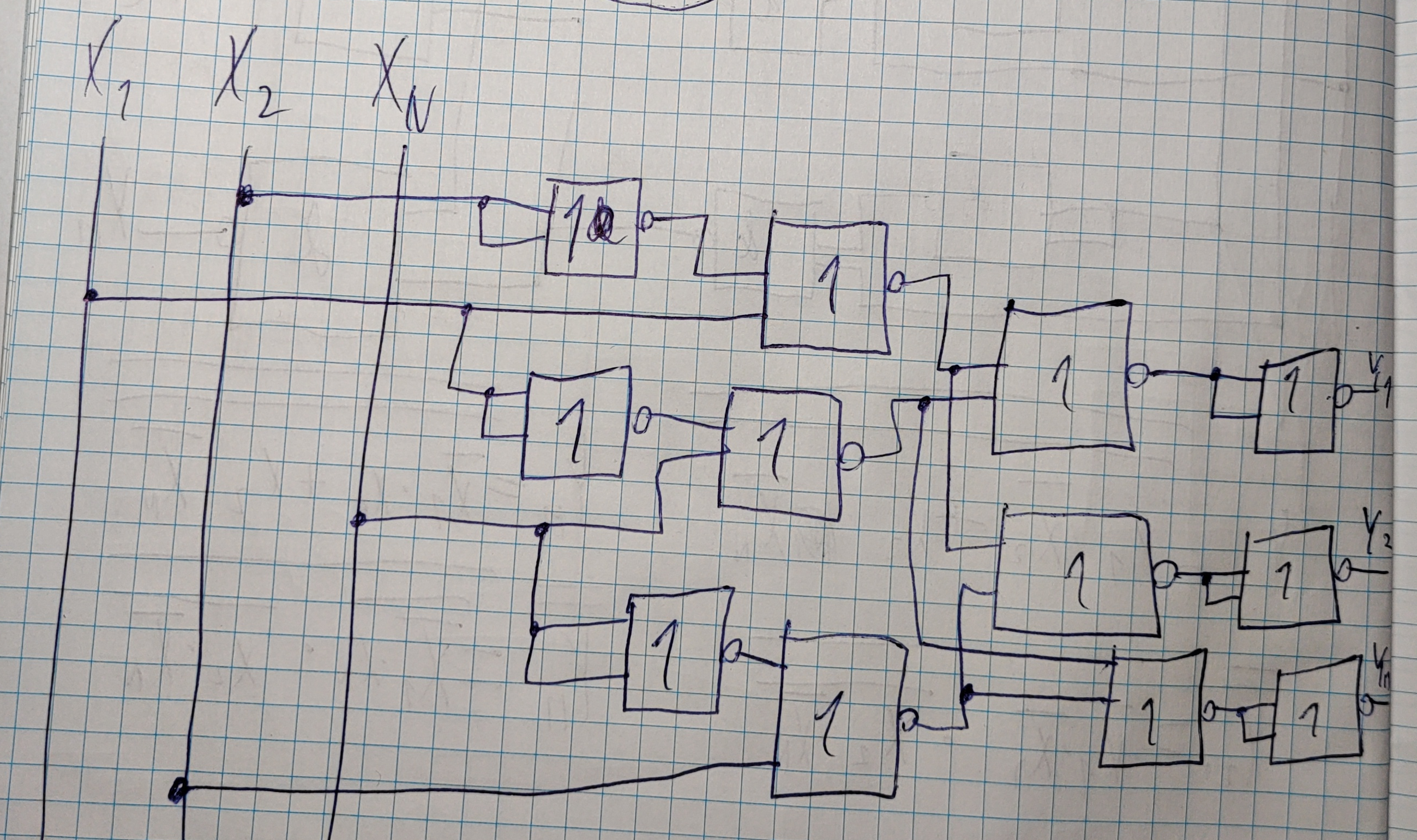
t
t
t
t
t
t
t
Taktiež nespojité riadenie
diskrétne riadenie
aspoň 1 veličina má tvar postupnosti, alebo aspoň 1 člen pracuje nespojito
z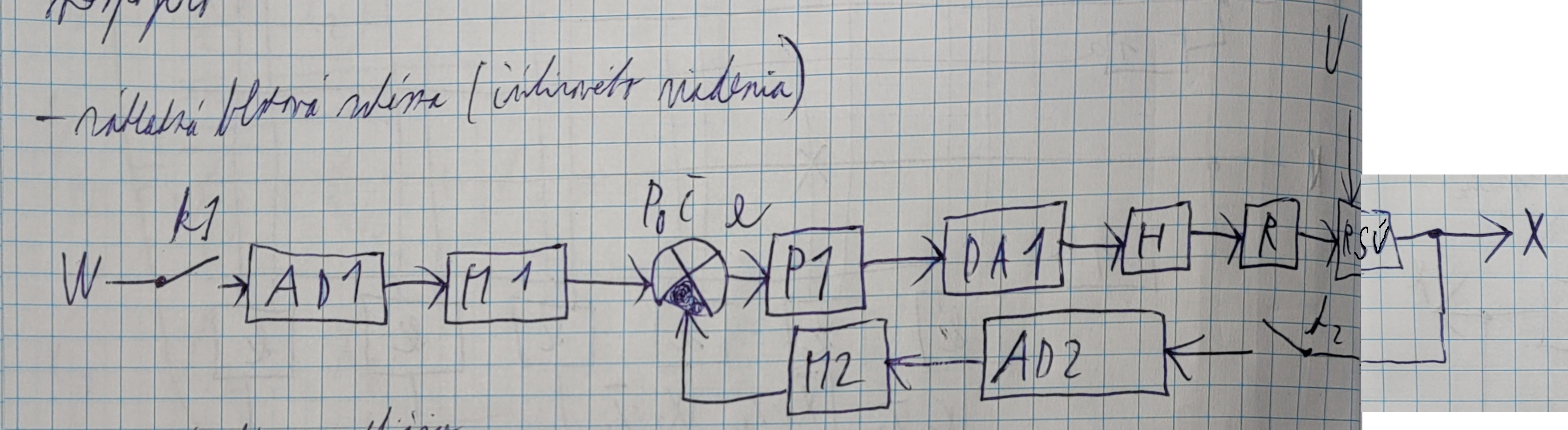 ákladná
bloková schéma
ákladná
bloková schéma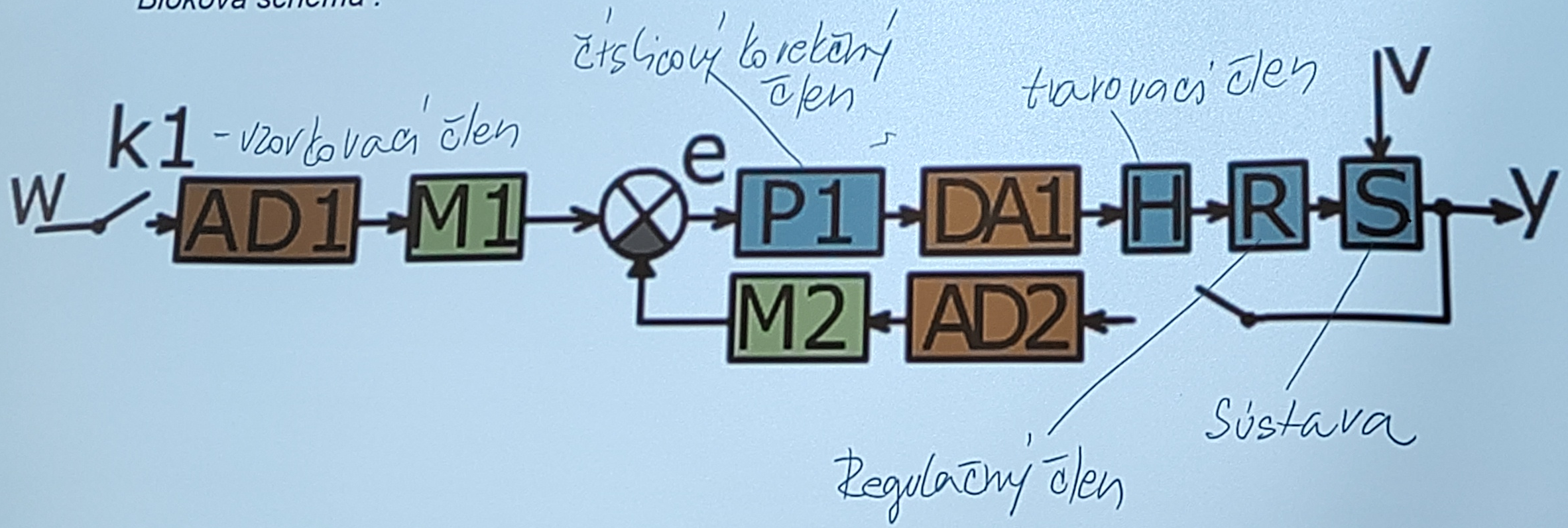
W – riadiaca veličina(požadovaná hodnota)
k1,k2 – vzorkovací člen
AD1, AD2 – A/D prevodník
M1 ,M2- pamäť
PoČ – porovnávací člen
P1 – číslicový korekčný člen
DA1 – D/A prevodník
H – tvarovací člen
R – regulátor, regulačný člen
RSÚ – regulovaná sústava
x – regulovaná (výstupná) veličina
U – poruchová veličina
e – regulačná odchýlka
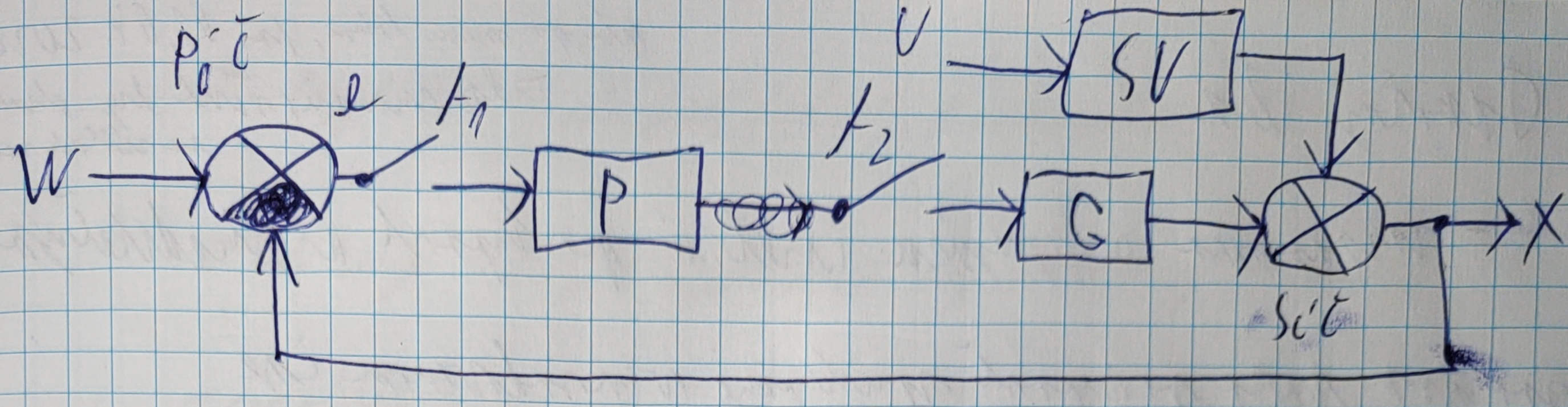
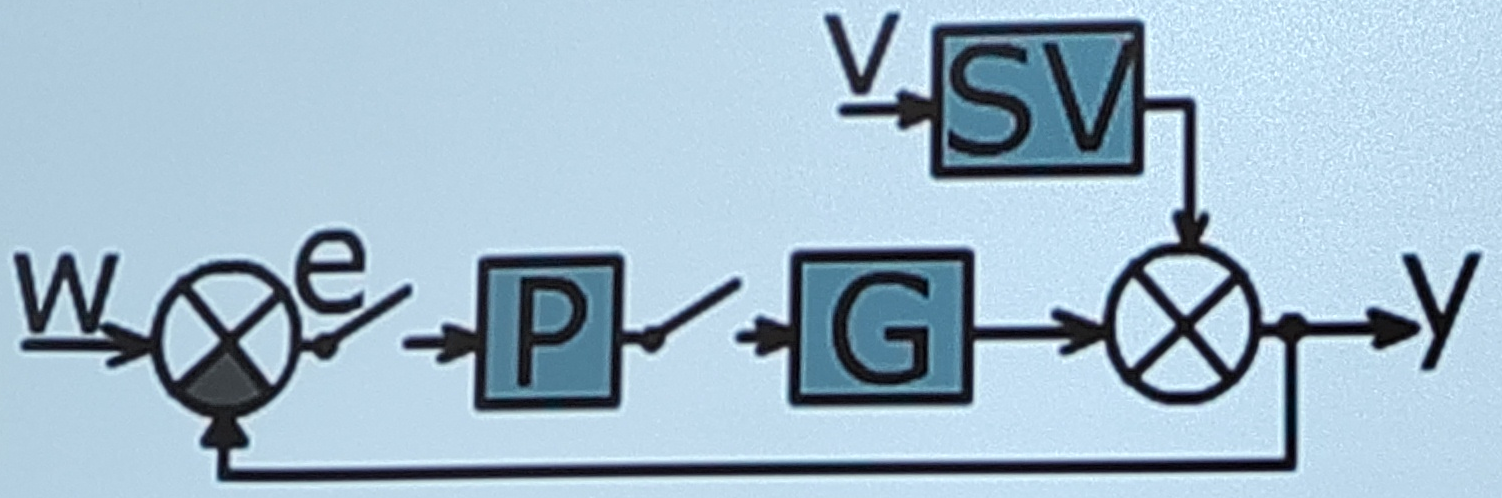
W – riadiaca veličina(požadovaná hodnota)
P – číslicový korekčný člen
PoČ – porovnávací člen
G – normálne členy DA1, H, RSÚ
SúČ – sčítavací člen
x – výstupná (riadená) veličina
e - regulačná odchýlka
U – chybová veličina
Vzorkovacie členy
vzorkuje po vopred stanovených časových okamihov
vstupným signálom je postupnosť signálov šírky δ, zanedbateľnej voči perióde vzorkovania
Tvarovací člen
tvaruje každý vstupný impulz šírky δ a amplitúdy, na signál tvarujúci jednu periódu
Pamäťový člen
zaznamená vstupujúcu číselnú postupnosť a riaditeľným spôsobom túto postupnosť sprístupňuje v požadovanom čase
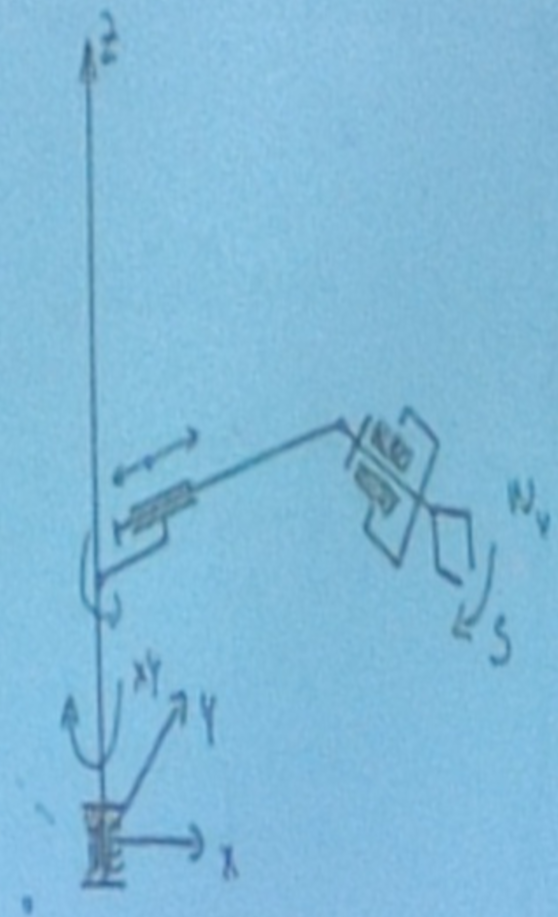
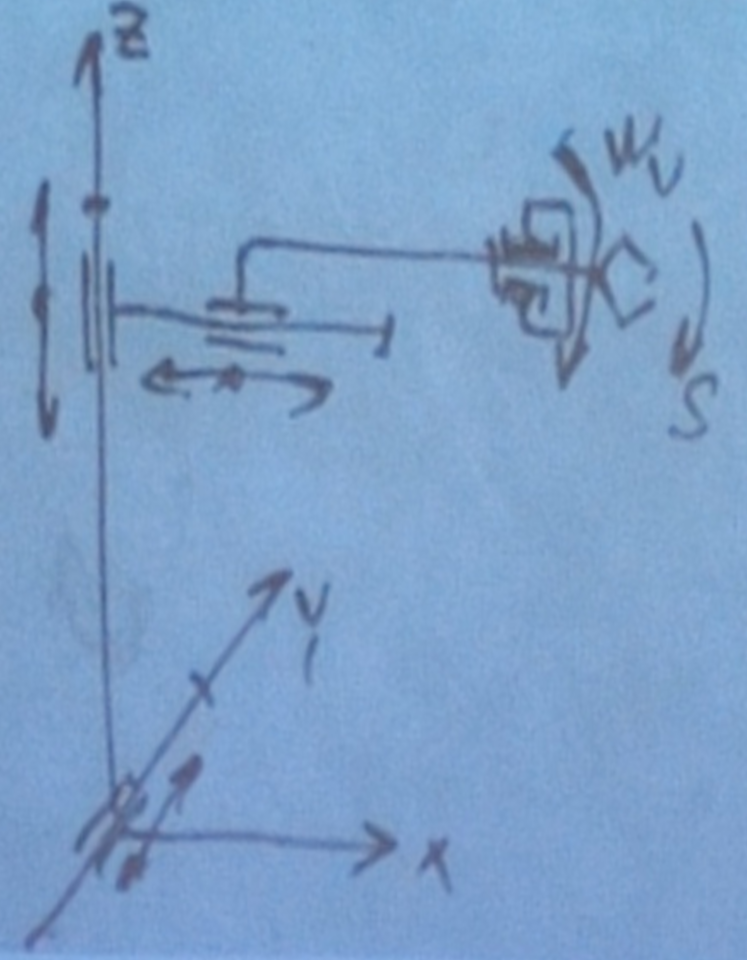
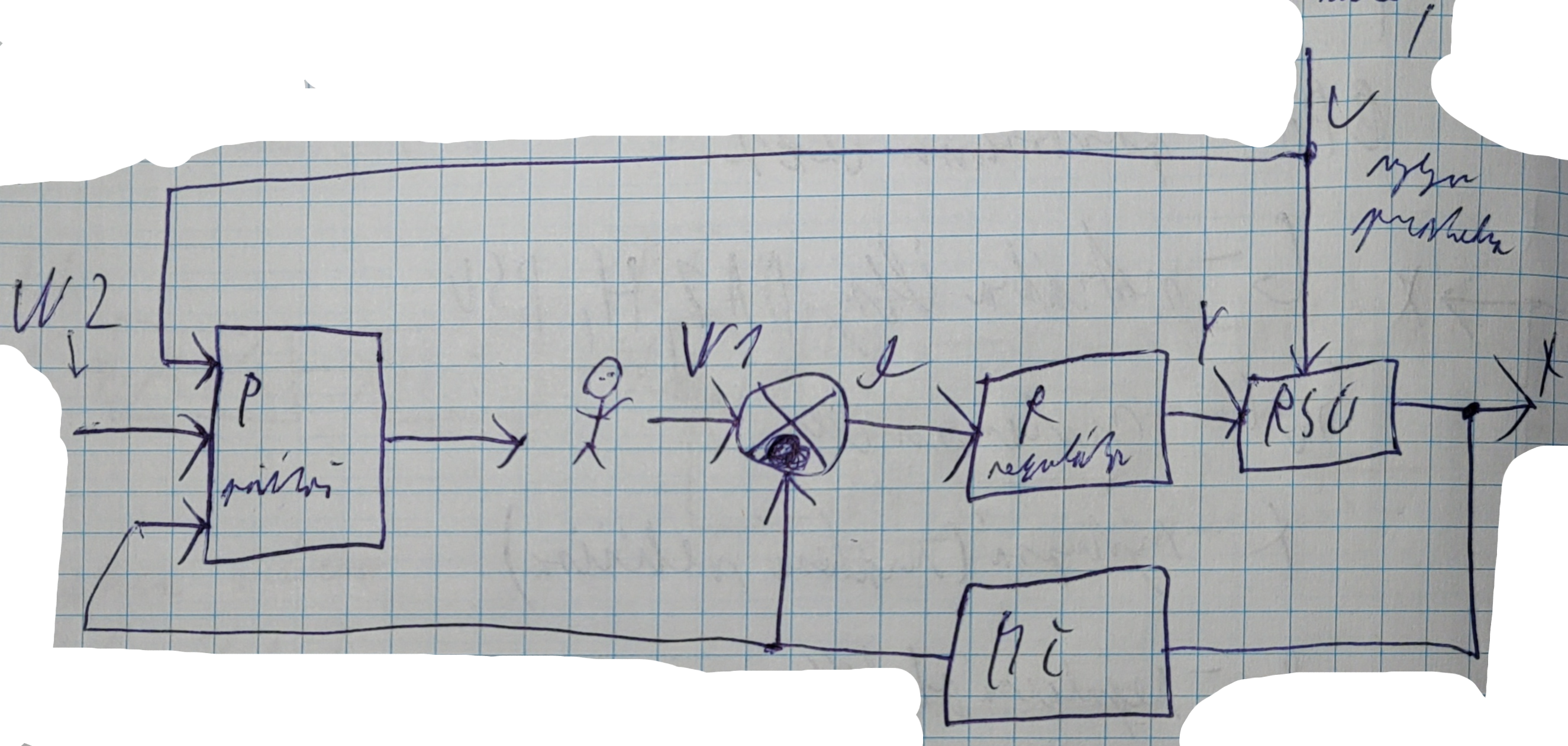
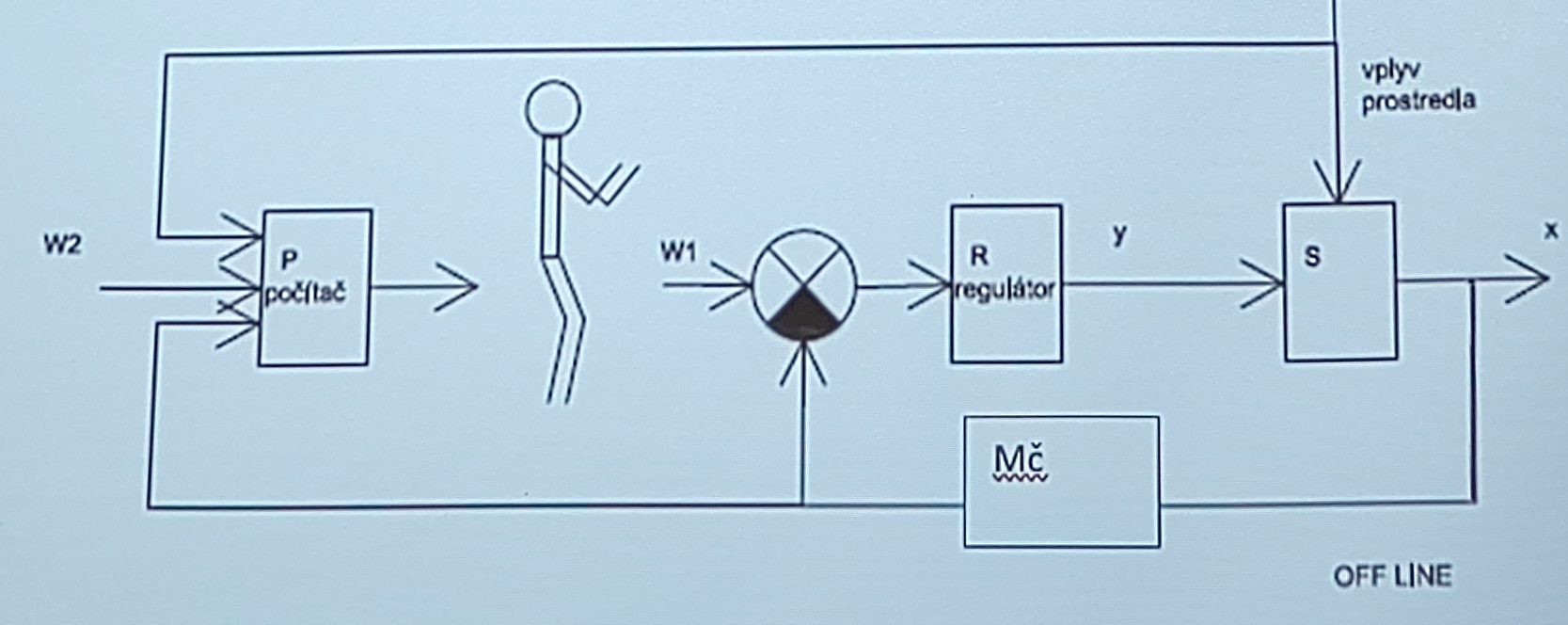
Nepriama číslicové riadenie v otvorenej slučke, nespriahnuté, off-line
akčnú veličinu y generuje regulátor, nie počítač
PC v tomto type riadenia slúži na zbieranie informácii o procese, na základe ktorých sa vykoná nastavenie riadenej veličiny W1.
PC rieši úlohy, ktoré nepriamo súvisia s riadením (procesom)
vypočítanie strednej hodnoty nameraných veličín
určuje straty + efektívnosť výrobného procesu
spoľahlivosť
PC nie je schopný riešiť úlohy reálneho času (nevie riadiť)
riadiacu veličinu w1 nastavuje obsluha, ktorá vykonáva rozhodovaciu funkciu
W2 prísun energie / materiálu / výrobkov, ktoré sa majú ďalej spracovať
S – regulovaná sústava, vo všetkých troch schémach – moje RSÚ
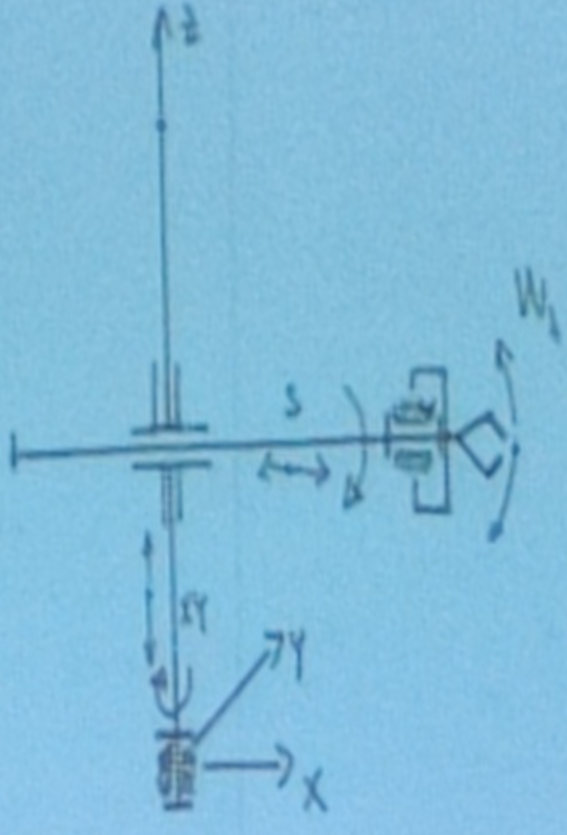
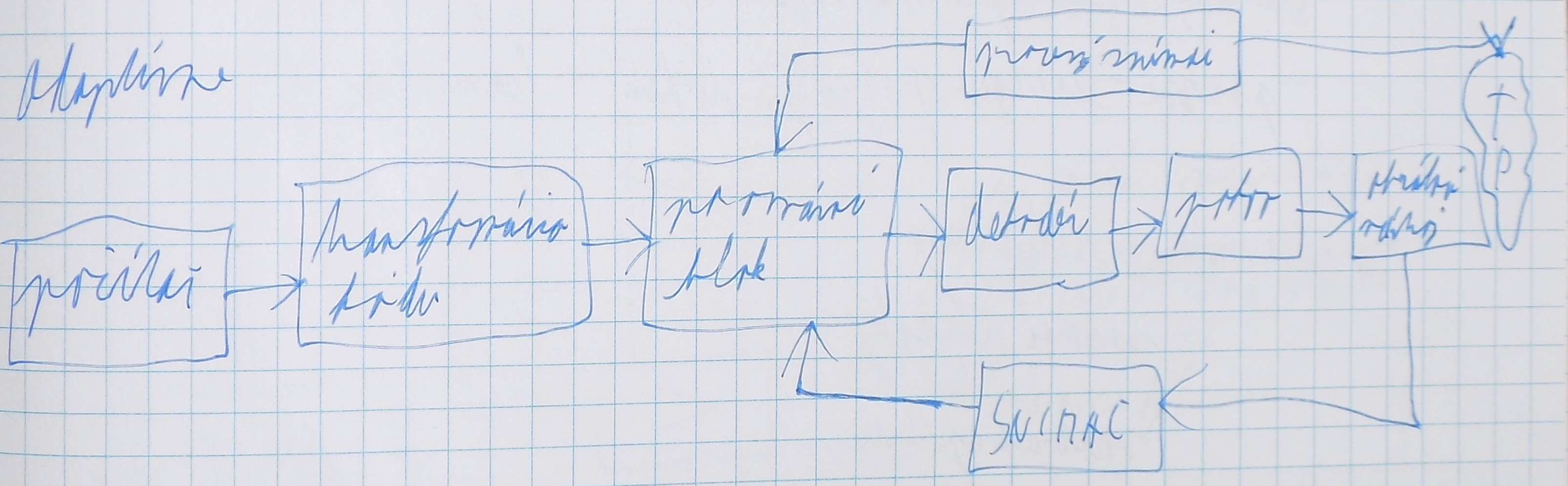
Nepriame číselné riadenie v uzavretej slučke, spriahnuté
PC vykonáva takú istú funkciu ako pri nespriahnutom riadení, ale aj s tým rozdielom, že vypočítané hodnoty riadiacej veličiny W1 nenastavuje obsluha, ale z PC sa cez D/A prevodník privádzajú priamo do porovnávacieho člena
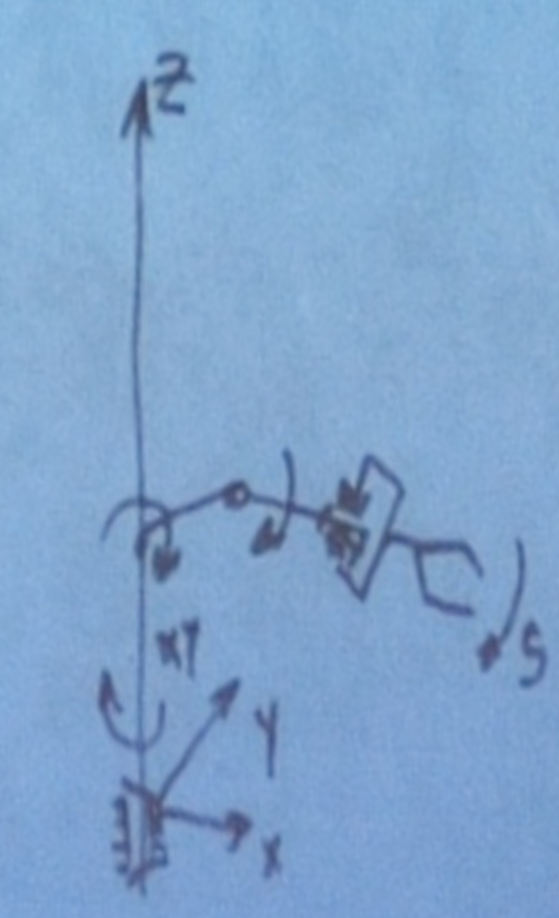
P riame
číslicové riadenie
riame
číslicové riadenie
PC v tomto type riadenia získava informácie o procese a priamo sa zúčastňuje riadenia
Tento typ riadenia vznikol v 2. polovici 80. rokov
predstavuje číslicovú náhradu analógových automatizovaných ?stavebníc? Určených pre riadenie nepretržitých technologických procesov
všetky tieto procesy majú rovnaké základné charakteristiky
technologická linka – nie je centralizovaná(iba na jednom mieste), ale je rozložená
pre optimálne riadenie procesu je nutné rýchle a bezporuchové meranie všetkých požadovaných veličín
musí byť rýchle a spoľahlivé aj ovládanie akčných členov
… (snáď je to všetko)
tieto problémy (požiadavky) sa v súčasnosti najčastejšie riešia decentralizovaným riadením
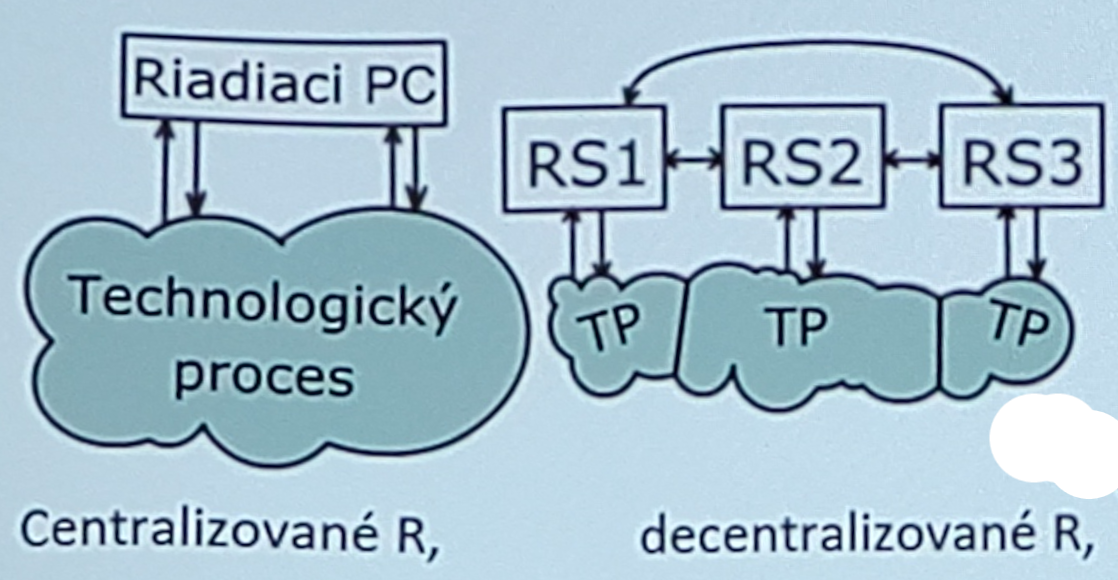
poznáme nasledujúce spôsoby DCS systémov:
centralizované riadenie
decentralizované riadenie
bez koordinátora
s koordinátorom
centralizovaný systém riadenia sa realizuje tam, kde sa vyžaduje veľmi vysoká bezpečnosť (atómové elektrárne, obrana štátu, letecká doprava, vlaková doprava, …)
býva riadené z jedného centrálneho PC – centralizované riadenie(centrálne)
zápory:
vysoká finančná náročnosť na prevádzku, kapacitu a na bezporuchový chod
nevýhody takého riadenia rieši decentralizované riadenie.
Tam kde je to možné používame decentralizovaný riadiaci systém
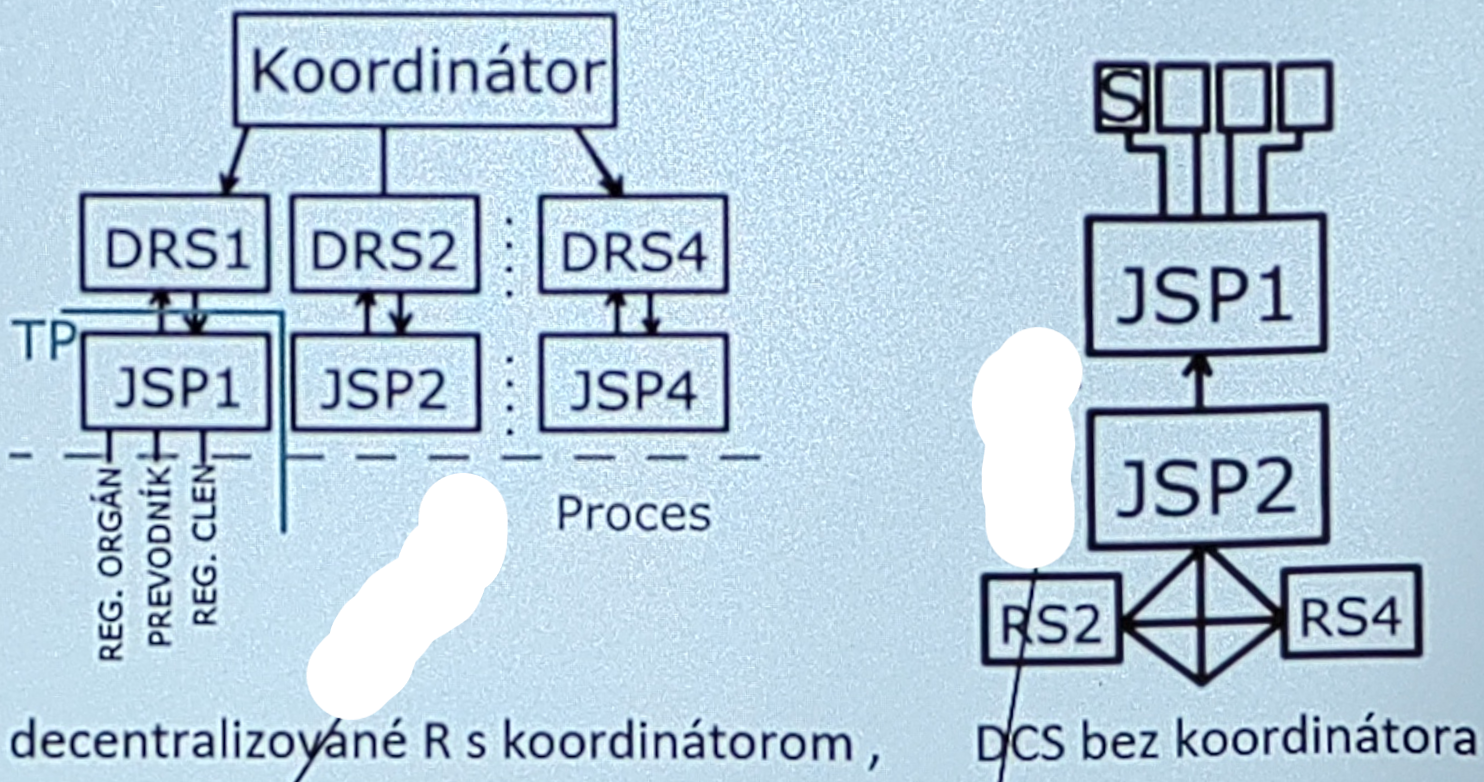
decentralizované riadenie bez koordinátora:
pri tomto type riadenia sa technologický proces rozdelí na menšie samostatné časti, ktoré riadia počítač nižšej úrovne komunikujúce navzájom medzi sebou[sic]
keď sa niektorý počítač pokazí, jeho funkciu preberá najbližší, podľa vopred daného pravidla
decentralizované riadenie s koordinátorom:
pri tomto riadení je koordinátor počítač vyššej úrovne a riadi počítače nižšej úrovne DRS a tie cez jednotku styku s prostredím JSP riadia svoju časť technologického procesu TP
pri poruche DRS jeho funkciu preberá koordinátor